
本文参加极术社区和灵动微电子组织的2022全国大学生物联网设计作品征集活动。
8月26日至8月27日,由全国高等学校计算机教育研究会主办,湖南大学信息科学与工程学院承办,华为技术有限公司协办,上海交通大学电子信息与电气工程学院和机械工业出版社华章公司联合支持的2022全国大学生物联网设计竞赛(华为杯)全国总决赛在湖南鲲鹏创新中心隆重举行,由于疫情原因,答辩采用线上形式,我们队伍参加的是安谋科技的命题,非常荣幸能够获得一等奖。
团队介绍
参赛单位:浙江师范大学
队伍名称:尖峰秃击队
指导老师:陈丽娜
参赛队员:董沅表、刘晓晓、陈世龙、朱宸毅
全国总决赛奖项:一等奖
安谋科技企业命题
竞赛题目:多足仿生机器人
竞赛内容:实现步态模拟:匍匐、前进、后退、左转、右转、左平移、右平移。
项目简介
随着科技的不断进步与发展,机器人的功能与外观发生了极大的变化。近年来,为了使得机器人能够适应并且应用于各种场景,科学家们通过研究、模仿生物的特征,发明设计了一系列仿生机器人。由于六足机器人具有复杂的腿部结构和多位置支撑的足部设计,可以靠传感器和控制系统实现重心位置的实时调整以保证其在不同路况与环境中良好的自稳能力。2013年,美国航天局推出了一款命名为ATHLETE的新型“六足机器人”。它装配有 “六条腿”,可以在月球复杂的地貌表面进行大范围的移动,使宇航员能够通过控制ATHLETE的移动来实现对月球的移动研究;发生像洪水、火灾、核泄漏等灾害时,六足机器人也为降低救援难度、提高救援效率发挥了重要作用。为了进一步研究仿生六足机器人的特征,改良功能,团队从3D建模结构设计、步态设计及软硬件设计等方面探索六足机器人的系统设计和实现方法
本项目使用的控制板是灵动微电子公司的MM32F5270开发板。MM32F5270是一款搭载了安谋科技Arm China STAR-MC1内核的MCU产品,其工作频率可达120MHz,内置多达256KB Flash和192KB RAM,配置浮点运算单元(Floating Point Unit,FPU)、数字信号处理单元(Digital Signal Processing,DSP)、信号间互联矩阵MindSwitch、可配置逻辑单元CLU、三角函数加速单元CORDIC等算法加速单元,并集成了丰富的外设模块和充足的I/O端口。MM32F5270相较于现有产品全面提升了性能、存储容量、总线架构和外设配置,旨在覆盖更广泛的工业、汽车和IoT应用,非常适合本项目使用。
六足机器人以蜘蛛为仿生对象,具有极强的环境适应能力,能够在火灾、煤矿等复杂环境中作业。本设计通过根据观察四足爬行动物的爬行姿态,基于仿生学基础之上设计了六足机器人的主体结构, 使用SolidWorks软件构造了六足机器人的机械结构,采用MM32F5277微控制器为控制核心,通过手机APP与PS2手柄控制18个RDS3120MG数字舵机,带动六足机器人的运动关节模拟昆虫的运动步态,抗干扰能力强,灵活度高。
特色与创新
1 手机APP实时获取机器人视角画面
相对于蓝牙而言,WIFI能够覆盖更远的距离,并且数据传输速度较快(WIFI的理论最高传输速率能够达到600Mbps,而蓝牙4.0的理论峰值仅有25Mbps)。针对传统机器人采用蓝牙无法实现数据高速传输的情况,本设计使用WIFI控制实现数据的快速传输,能够实时传输高清画质的图像。通过手机APP控制六足机器人能够具有运动更加灵活,机器人控制和调试更加便捷高效,实时获取机器人视角画面等优点。如图1所示为本设计所采用的摄像头模块,图2所示为本设计的手机APP控制画面。 
图1 ESP-32透传模块

图 2 手机APP控制画面
除了实现了七种基本动作之外,本团队还设计还拓展实现了如跳舞,挥手,做俯卧撑等动作,增加了作品的趣味性
系统设计
总体结构设计
六足仿生机器人拥有18个舵机关节可以实现自由移动,它具有激光测距、温湿度检测、电池电压检测、图像传输等基本功能。该系统的设计主要分为两部分:机械结构设计和电子核心硬件设计。机器人采用MM32F5277作为控制核心,通过串口通信的方式与舵机控制板进行数据交互,完成指定动作。机器人的总体结构框图如图 3 所示。 
图 3 六足机器人总体结构框图
机械结构搭建
六足机器人以六足蜘蛛的外形结构和运动特征为仿生对象,使用SolidWorks对机器人的小腿部件进行设计。图 4 显示的是六足机器人的整体框架结构,骨架部分由18个舵机、6个小腿部件组成。
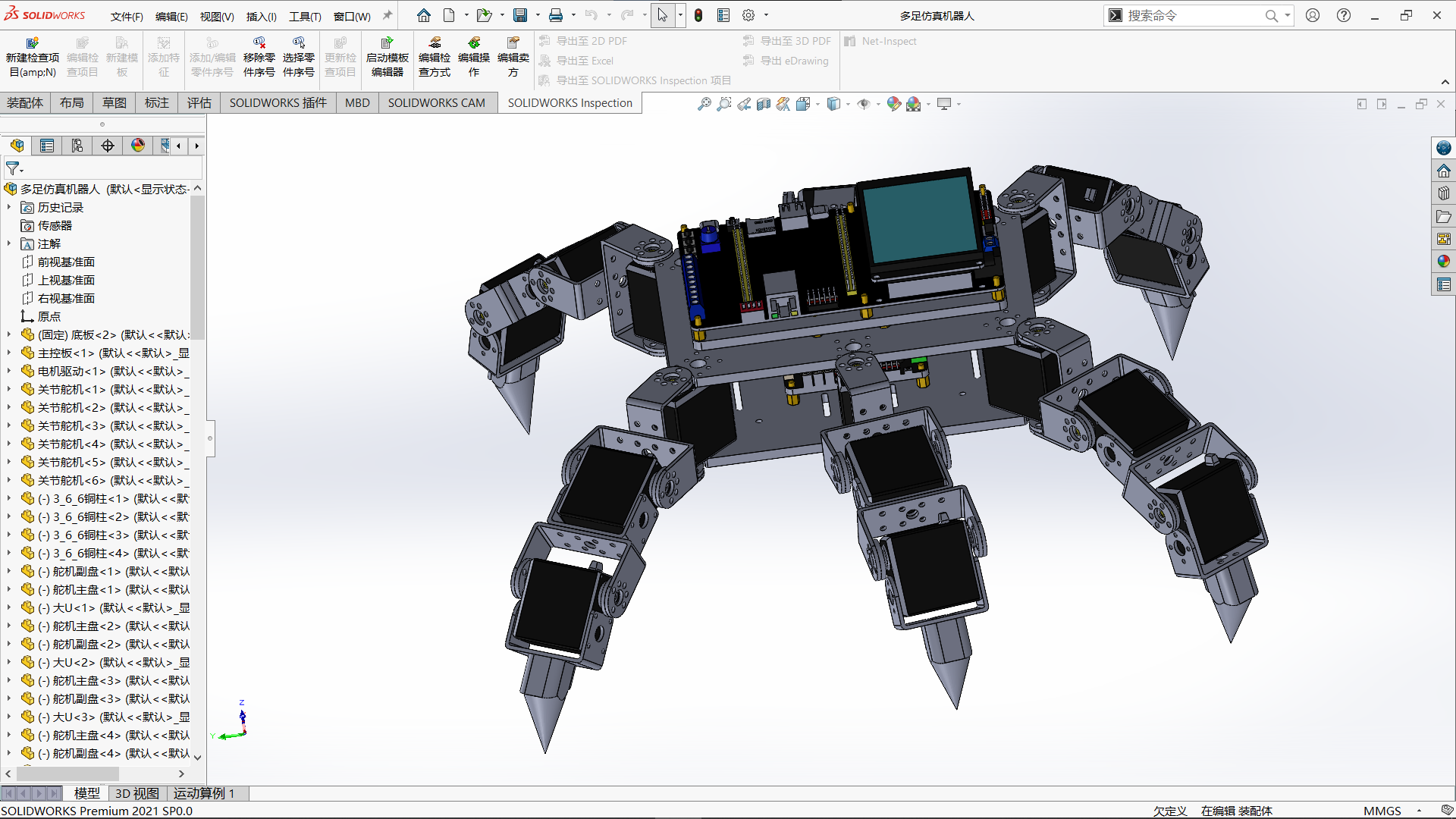
图4 六足机器人设计模型
控制电路设计
六足机器人的控制系统主要包括 24 路舵机控制板、主控板、外部的舵机模块和传感器模块,具体结构框图如图 5 所示。温湿度传感器、激光测距模块采集环境信息,MM32F5277作为控制核心发送串口指令到24路舵机,并且利用舵机控制板控制控制机器人的 18 个高精度数字舵机完成一系列步态姿势控制动作。
1 数字关节舵机
机器人的每只足部都安装有三个数字舵机,能实现三个自由度的控制,具有较高的灵活性。舵机的转动可以通过改变PWM的占空比来实现。PWM方波的周期为 20 ms,输入信号脉宽从0.5 ms,间隔 0.5 ms增长直到 2.5 ms,对应舵机转角 0°到 270°,其内部的齿轮组可以将马达的扭矩稳定的输出,输出角度由控制模块控制,其控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。内部具有基准电路,将获得的直流偏置电压与电位器的电压比较,最后通过电压差的正负决定电机的正反转。
2 舵机控制模块
本设计的六足机器人采用 ZL-IS2舵机驱动模块控制18个RDS3120MG舵机,并且能够直接利用MM32F5277主控制器的USART口传输来控制此舵机控制板,从而可以使六足机器人灵活地切换不同的姿态。
3 软件程序设计
六足机器人程序控制系统框图如图 5所示。供电后系统初始化,舵机初始化完成后,使舵机进入默认的设定角度。等待指定的初始化动作,为机器人接收到指令后的运动做好准备。当机器人接收到控制端传来的行动指令时,就会执行对应的姿态程序,如:卧伏、前进、后退、左转、右转、左横向平移、右横向平移基本动作。在程序运行中自动执行避障功能,根据激光测距模块得到的距离信息,控制机器人报警;在机器人运行过程能够实时测量周围的环境温湿度,当周围环境温度不在适合执行任务时能够通过蜂鸣器发出警报。 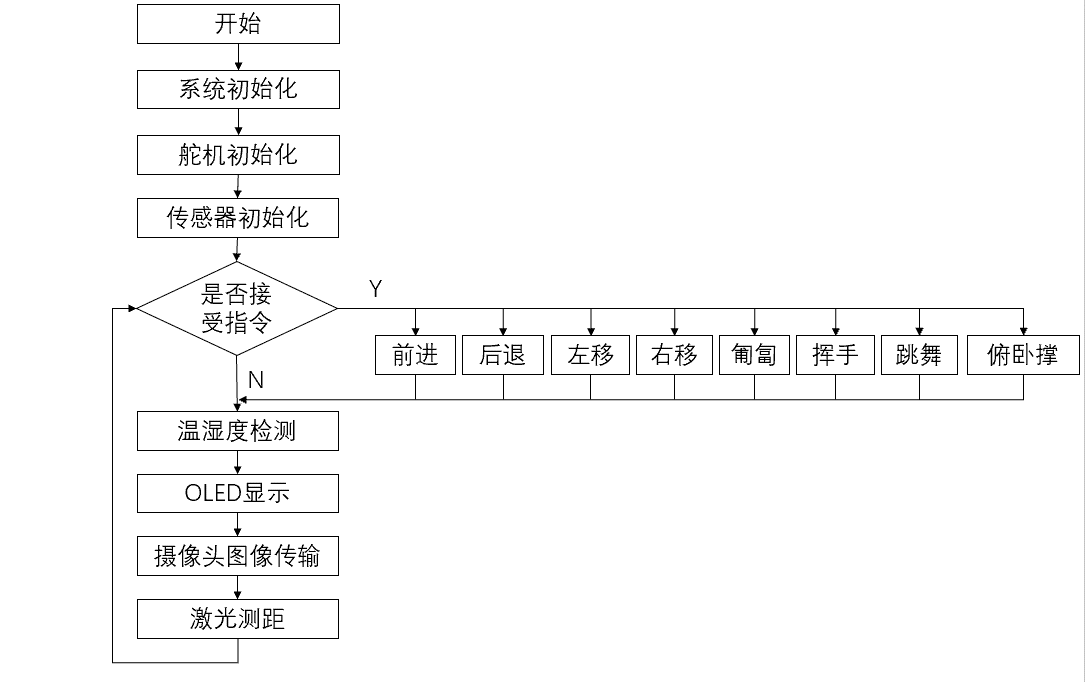
图 5 六足机器人程序控制系统框图
视频演示
https://www.bilibili.com/video/BV1WB4y137Jt/?aid=602838486&cid=826253722&page=1

