无人机飞控是无人机的核心部分,一般包括传感器、机载计算机和伺服作动设备三大部分,能否在对重量和体积有严苛要求的无人机结构上部署具有稳定功能的飞控,是影响无人机飞行表现的重要因素。
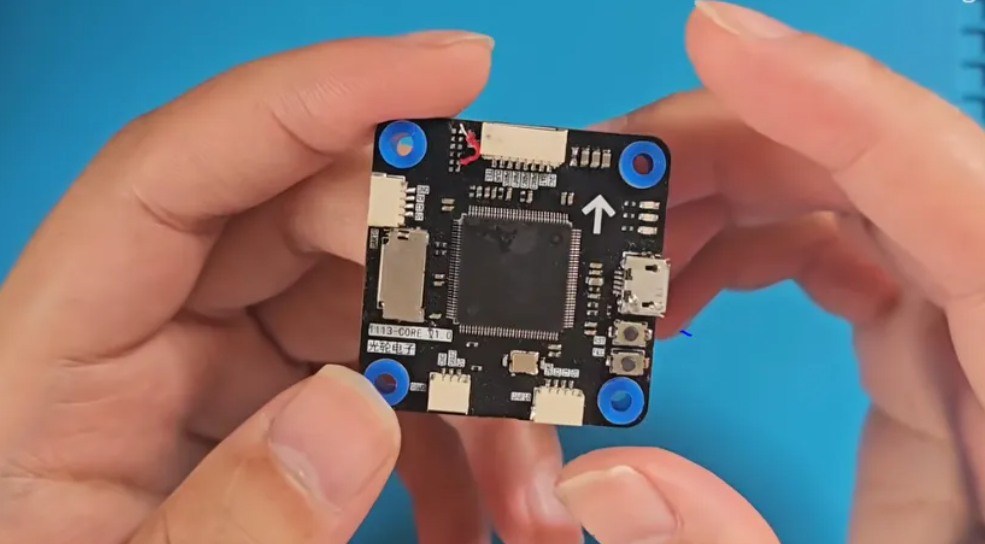
基于此,作者就基于全志T113-S3设计了一款仅有30x30孔距的超轻量无人机飞控,可以实现无人机的自稳飞行及远距离图传。



飞控设置
这款使用全志T113-S3处理器制作的PX4飞控整体硬件设计并不复杂,飞控板载主控、IMU、磁力计、气压计以及其它常见的元件,并由T113直接输出PWM控制飞行器,并使用1路ADC来采集电池的电压,PCB孔距30x30,可以与市面上常见的四合一电调搭配使用。
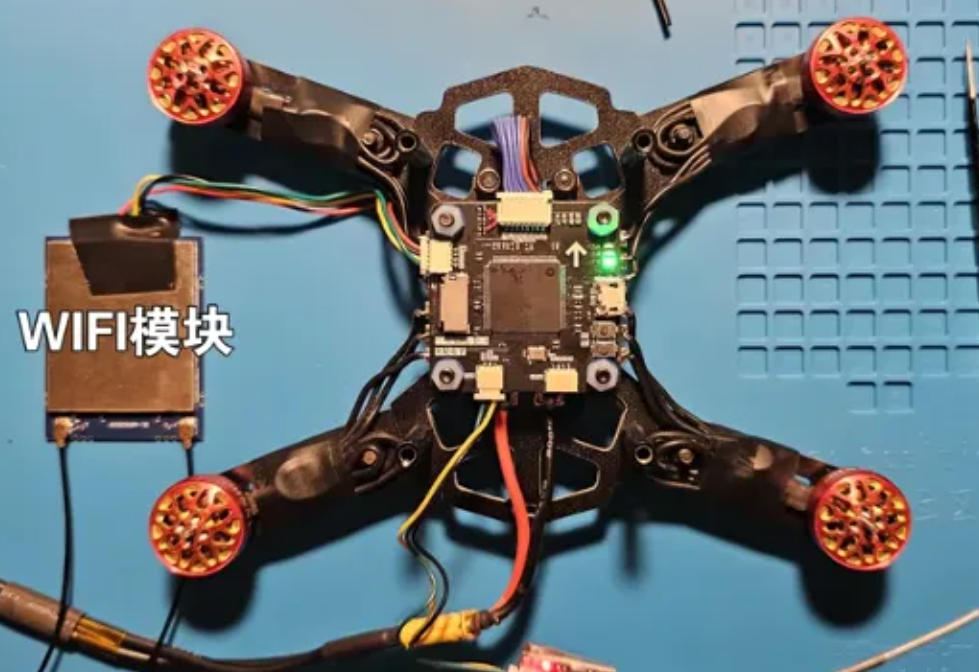
远程通信方面,T113通过USB直接与WiFi模块连接,接收机则是连接串口通过SBUS和T113直接连接,收到指令信号后由4路PWM直接给电机控制输出,以实现自稳飞行的功能。
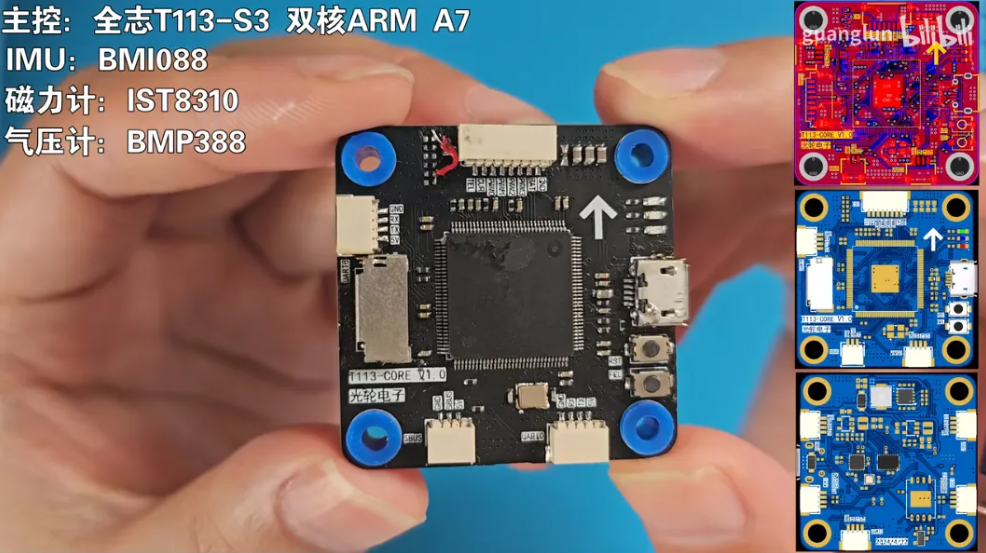
- 主控:全志T113,双核ARM A7
- 内存:内置128MB DDR
- 磁力计:IST8310
- 气压计:BMP388
- IMU:BMI088
- 操作系统:全志Tina Linux
无人机自稳飞行功能测试
无人机通过飞控和WiFi模块结合,形成一个SBUS接收机,来实现本地的数据传输与远程控制。
如下图中的画面所示,左侧是飞控通过WiFi与QGC连接后将无人机姿态数据返回的显示界面,右侧的画面则是T113芯片的负载情况显示,T113是双核处理器,作者这里只把T113的核心1做了隔离,只运行PX4程序,所以可以通过核心1的反馈直接看运行PX4程序的负载情况,核心0是负责系统上的其他程序运行。

首先在自稳模式下将PID参数调稳定,调试Multicopter Rate Control菜单下的相关参数,自稳PID调试完成后,此时飞行会发现飞行器总是会朝某个方向“倾斜”飞行,此时最好先将机体各部位都固定稳定,中心最好在机体中心(电池位置最好也固定,不然电池的拆卸也是影响重心的一个要点)。
然后调试Sensors菜单下的两个参数,最完美的状态是调试到roll和pitch不总是朝一个方向飞行,只会随机朝某个方向缓慢飞行。随后切换到offboard模式进行定位调试,如果设置指定高度后飞行器一直飞行不到指定高度,调试定位的参数。
开源资料
本文与T113无人机飞控相关的所有内容均转载自原作者个人网页和的工程页面和B站视频,软硬件资料介绍均有,感兴趣的小伙伴可以复制下方链接或者戳文末的“阅读原文”阅读了解。

光轮电子个人主页:https://www.guanglundz.com/
视频版介绍:https://www.bilibili.com/video/BV1mDYMe2E2i/
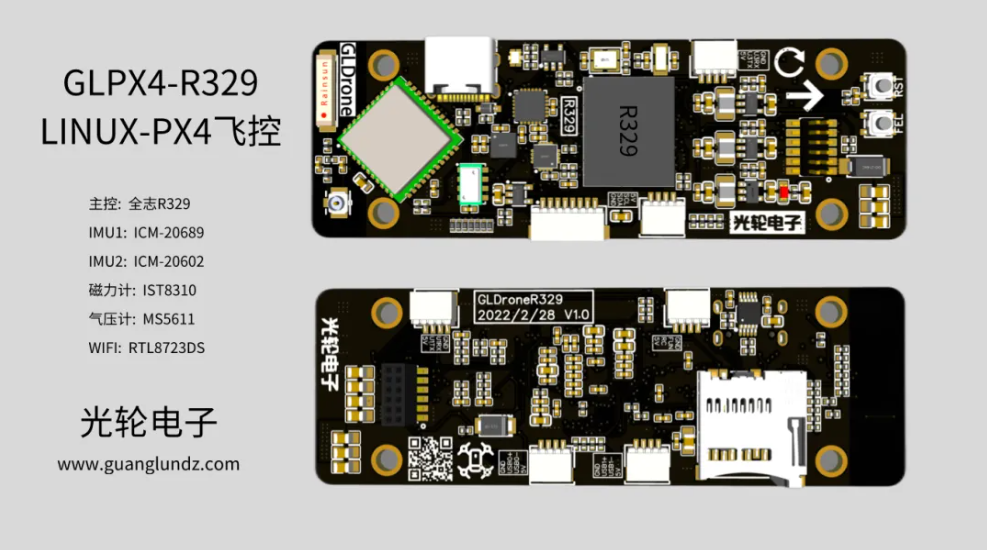
作者本人也曾使用R329芯片做过PX4的无人机飞控,同样采用Linux系统的方案,感兴趣的小伙伴也可以参考R329飞控的介绍,进行相关产品的DIY复刻。
R329无人机飞控网页:https://www.guanglundz.com/gldrone/glpx4-r329/