
队列基本概念
队列是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递消息,实现了任务接收来自其他任务或中断的不固定长度的消息,任务能够从队列里面读取消息,当队列中的消息是空时,读取消息的任务将被阻塞,用户还可以指定任务等待消息的时间timeout,在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当队列中有新消息时,被阻塞的任务会被唤醒并处理新消息;当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转为就绪态,消息队列是一种异步的通信方式。
通过队列服务,任务或中断服务例程可以将一条或多条消息放入队列中。同样,一个或多个任务可以从队列中获得消息。当有多个消息发送到队列时,通常是将先进入队列的消息先传给任务,也就是说,任务先得到的是最先进入队列的消息,即先进先出原则(FIFO),其实TencentOS tiny暂时不支持后进先出原则LIFO操作队列,但是支持后进先出操作消息队列。
提示:TencentOS tiny的队列不等同于消息队列,虽然队列的底层实现是依赖消息队列,但在TencentOS tiny中将它们分离开,这是两个概念,毕竟操作是不一样的。
队列的阻塞机制
举个简单的例子来理解操作系统中的阻塞机制:
假设你某天去餐厅吃饭,但是餐厅没菜了,那么你可能会有3个选择,你扭头就走,既然都没菜了,肯定换一家餐厅啊是吧。或者你会选择等一下,说不定老板去买菜了,一会就有菜了呢,就能吃饭。又或者,你觉得这家餐厅非常好吃,吃不到饭你就不走了,在这死等~
同样的:假设有一个任务A对某个队列进行读操作的时候(出队),发现它此时是没有消息的,那么此时任务A有3个选择:第一个选择,任务A扭头就走,既然队列没有消息,那我也不等了,干其它事情去,这样子任务A不会进入阻塞态;第二个选择,任务A还是在这里等等吧,可能过一会队列就有消息,此时任务A会进入阻塞状态,在等待着消息的到来,而任务A的等待时间就由我们自己指定,当阻塞的这段时间中任务A等到了队列的消息,那么任务A就会从阻塞态变成就绪态;假如等待超时了,队列还没消息,那任务A就不等了,从阻塞态中唤醒;第三个选择,任务A死等,不等到消息就不走了,这样子任务A就会进入阻塞态,直到完成读取队列的消息。
队列实现的数据结构
队列控制块
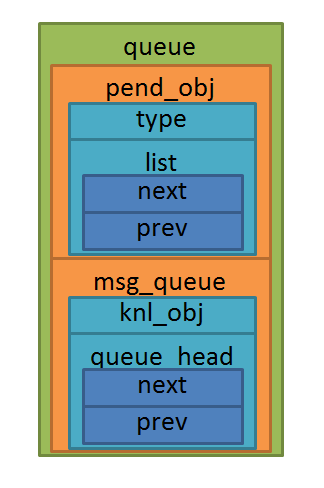
TencentOS tiny 通过队列控制块操作队列,其数据类型为k_queue_t,队列控制块由多个元素组成,主要有 pend_obj_t 类型的pend_obj以及k_msg_queue_t 类型的msg_queue消息列表。其实整个队列的实现非常简单,主要靠msg_queue中的queue_head成员变量(这其实是一个消息列表(消息链表)),所有的消息都会被记录在这个消息列表中,当读取消息的时候,会从消息列表读取消息。
继承自内核对象的数据结构 在 \kernel\core\include\tos_pend.h 的 35 行
typedef struct pend_object_st {
pend_type_t type;
k_list_t list;
} pend_obj_t;消息列表的数据类型(消息队列控制块),在 \kernel\core\include\tos_msg.h 文件的第 13 行
typedef struct k_msg_queue_st {
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
knl_obj_t knl_obj;
#endif
k_list_t queue_head;
} k_msg_queue_t;队列控制块,在 \kernel\core\include\tos_queue.h 文件的第 6 行
typedef struct k_queue_st {
pend_obj_t pend_obj;
k_msg_queue_t msg_queue;
} k_queue_t;队列控制块示意图如下:
消息控制块
除了上述的队列控制块外,还有消息队列控制块,这是因为TencentOS tiny中实现队列是依赖消息队列的,既然队列可以传递数据(消息),则必须存在一种可以存储消息的数据结构,我称之为消息控制块,消息控制块中记录了消息的存储地址msg_addr,以及消息的大小msg_size,此外还存在一个list成员变量,可以将消息挂载到队列的消息列表中。
消息控制块数据结构, 在 \kernel\core\include\tos_msg.h 文件的第 7 行
typedef struct k_message_st {
k_list_t list;
void *msg_addr;
size_t msg_size;
} k_msg_t;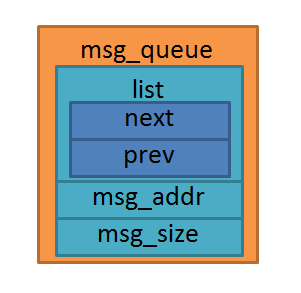
其实队列的实现依赖于消息队列,他们的关系如下:
任务控制块中的消息成员变量
假设任务A在队列中等待消息,而中断或其他任务往任务A等待的队列写入(发送)一个消息,那么这个消息不会被挂载到队列的消息列表中,而是会直接被记录在任务A的任务控制块中,表示任务A从队列中等待到这个消息,因此任务控制块必须存在一些成员变量用于记录消息相关信息(如消息地址、消息大小等):
任务控制块数据结构 在\kernel\core\include\tos_task.h文件的第 90 行
typedef struct k_task_st {
···
#if TOS_CFG_MSG_EN > 0u
void *msg_addr; /**< 保存接收到的消息地址 */
size_t msg_size; /**< 保存接收到的消息大小 */
#endif
···
} k_task_t;与消息相关的宏定义
在tos_config.h文件中,使能队列组件的宏定义TOS_CFG_QUEUE_EN,使能消息队列组件宏定义TOS_CFG_MSG_EN,系统支持的消息池中消息个数宏定义TOS_CFG_MSG_POOL_SIZE。
#define TOS_CFG_QUEUE_EN 1u
#define TOS_CFG_MSG_EN 1u
#define TOS_CFG_MSG_POOL_SIZE 3u消息池
在TencentOS tiny中定义了一个数组k_msg_pool[TOS_CFG_MSG_POOL_SIZE]作为消息池,它的数据类型是消息控制块类型k_msg_t,因为在使用消息队列的时候存取消息比较频繁,而在系统初始化的时候就将这个大数组的各个元素串初始化,并挂载到空闲消息列表中k_msg_freelist,组成我们说的消息池k_msg_pool,而池中的成员变量就是我们所说的消息。
为什么使用池化的方式处理消息呢,因为高效,复用率高,就像我们在池塘中去一勺水,在使用完毕再将其归还到池塘,这种操作是非常高效的,并且在有限资源的嵌入式中能将资源重复有效地利用起来。消息池相关的定义 在\kernel\core\tos_global.c文件 第 51 行
#if TOS_CFG_MSG_EN > 0u
TOS_LIST_DEFINE(k_msg_freelist);
k_msg_t k_msg_pool[TOS_CFG_MSG_POOL_SIZE];
#endif队列创建
tos_queue_create()函数用于创建一个队列,队列就是一个数据结构,用于任务间的数据的传递。每创建一个新的队列都需要为其分配RAM,在创建的时候我们需要自己定义一个队列控制块,其内存是由编译器自动分配的。在创建的过程中实际上就是将队列控制块的内容进行初始化,将队列控制块的 pend_obj成员变量中的type 属性标识为PEND_TYPE_QUEUE,表示这是一个队列,然后调用消息队列中的API函数tos_msg_queue_create()将队列的消息成员变量msg_queue初始化,实际上就是初始化消息列表。
创建队列函数,在\kernel\core\tos_queue.c 第 5 行
__API__ k_err_t tos_queue_create(k_queue_t *queue)
{
TOS_PTR_SANITY_CHECK(queue);
pend_object_init(&queue->pend_obj, PEND_TYPE_QUEUE);
tos_msg_queue_create(&queue->msg_queue);
return K_ERR_NONE;
}销毁队列
tos_queue_destroy()函数用于销毁一个队列,当队列不在使用是可以将其销毁,销毁的本质其实是将队列控制块的内容进行清除,首先判断一下队列控制块的类型是PEND_TYPE_QUEUE,这个函数只能销毁队列类型的控制块。然后判断是否有任务在等待队列中的消息,如果有则调用pend_wakeup_all()函数将这项任务唤醒,然后调用tos_msg_queue_flush()函数将队列的消息列表的消息全部“清空”,“清空”的意思是将挂载到队列上的消息释放回消息池(如果队列的消息列表存在消息,使用msgpool_free()函数释放消息),knl_object_deinit()函数是为了确保队列已经被销毁,此时队列控制块的pend_obj成员变量中的type 属性标识为KNL_OBJ_TYPE_NONE。最后在销毁队列后进行一次任务调度,以切换任务(毕竟刚刚很可能唤醒了任务)。
但是有一点要注意,因为队列控制块的RAM是由编译器静态分配的,所以即使是销毁了队列,这个内存也是没办法释放的~销毁队列函数,在\kernel\core\tos_queue.c 第 14 行
__API__ k_err_t tos_queue_destroy(k_queue_t *queue)
{
TOS_CPU_CPSR_ALLOC();
TOS_PTR_SANITY_CHECK(queue);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
if (!pend_is_nopending(&queue->pend_obj)) {
pend_wakeup_all(&queue->pend_obj, PEND_STATE_DESTROY);
}
pend_object_deinit(&queue->pend_obj);
tos_msg_queue_flush(&queue->msg_queue);
TOS_CPU_INT_ENABLE();
knl_sched();
return K_ERR_NONE;
}清空队列
清空队列实际上就是将消息释放回消息池中,本质上还是调用tos_msg_queue_flush()函数。它是依赖于消息队列实现的。
清空队列函数,在\kernel\core\tos_queue.c 第 41 行
__API__ k_err_t tos_queue_flush(k_queue_t *queue)
{
TOS_CPU_CPSR_ALLOC();
TOS_PTR_SANITY_CHECK(queue);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
tos_msg_queue_flush(&queue->msg_queue);
TOS_CPU_INT_ENABLE();
return K_ERR_NONE;
}等待队列(消息)
当任务试图从队列中的获取消息时,用户可以指定一个等待时间,当且仅当队列存在消息的时候,任务才能获取到消息。在等待的这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列消息有效。当其他任务或中断服务程序往其等待的队列中写入了数据,该任务将自动由阻塞态转为就绪态。当任务等待发生超时,即使队列中尚无有效消息,任务也会自动从阻塞态转为就绪态。
等待队列的过程也是非常简单的,先来看看参数吧(其中msg_addr与msg_size参数是用于保存函数返回的内容,即输出):
| 参数 | 说明 |
|---|---|
| queue | 队列控制块指针 |
| msg_addr | 用于保存获取到的消息(这是输出的) |
| msg_size | 用于保存获取到消息的大小(这是输出的) |
| timeout | 等待时间(以k_tick_t为单位) |
等待队列消息的过程如下:
- 首先检测传入的参数是否正确
- 尝试调用
tos_msg_queue_get()函数获取消息,如果队列存在消息则会获取成功(返回K_ERR_NONE),否则获取失败。(关于该函数在下一章讲解) - 当获取成功则可以直接退出函数,而当获取消息失败的时候,则可以根据指定的等待时间
timeout进行阻塞,如果不等待(timeout =TOS_TIME_NOWAIT),则直接返回错误代码K_ERR_PEND_NOWAIT。 - 如果调度器被锁了
knl_is_sched_locked(),则无法进行等待操作,返回错误代码K_ERR_PEND_SCHED_LOCKED,毕竟需要切换任务,调度器被锁则无法切换任务。 - 调用
pend_task_block()函数将任务阻塞,该函数实际上就是将任务从就绪列表中移除k_rdyq.task_list_head[task_prio],并且插入到等待列表中object->list,如果等待的时间不是永久等待TOS_TIME_FOREVER,还会将任务插入时间列表中k_tick_list,阻塞时间为timeout,然后进行一次任务调度knl_sched()。 - 当程序能执行到
pend_state2errno()时,则表示任务等待到消息,又或者发生超时,那么就调用pend_state2errno()函数获取一下任务的等待状态,看一下是哪种情况导致任务恢复运行。 - 如果是正常情况(等待获取到消息),则将消息从任务控制块的
k_curr_task->msg_addr读取出来,并且写入msg_addr中用于返回。同样的消息的大小也是会通过msg_size返回。
获取(等待)队列消息函数,在\kernel\core\tos_queue.c 第 60 行
__API__ k_err_t tos_queue_pend(k_queue_t *queue, void **msg_addr, size_t *msg_size, k_tick_t timeout)
{
TOS_CPU_CPSR_ALLOC();
k_err_t err;
TOS_PTR_SANITY_CHECK(queue);
TOS_PTR_SANITY_CHECK(msg_addr);
TOS_PTR_SANITY_CHECK(msg_size);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
if (tos_msg_queue_get(&queue->msg_queue, msg_addr, msg_size) == K_ERR_NONE) {
TOS_CPU_INT_ENABLE();
return K_ERR_NONE;
}
if (timeout == TOS_TIME_NOWAIT) {
*msg_addr = K_NULL;
*msg_size = 0;
TOS_CPU_INT_ENABLE();
return K_ERR_PEND_NOWAIT;
}
if (knl_is_sched_locked()) {
TOS_CPU_INT_ENABLE();
return K_ERR_PEND_SCHED_LOCKED;
}
pend_task_block(k_curr_task, &queue->pend_obj, timeout);
TOS_CPU_INT_ENABLE();
knl_sched();
err = pend_state2errno(k_curr_task->pend_state);
if (err == K_ERR_NONE) {
*msg_addr = k_curr_task->msg_addr;
*msg_size = k_curr_task->msg_size;
k_curr_task->msg_addr = K_NULL;
k_curr_task->msg_size = 0;
}
return err;
}将等待消息的任务添加到对应等待列表函数,在\kernel\core\tos_pend.c文件的 第 106 行
__KERNEL__ void pend_task_block(k_task_t *task, pend_obj_t *object, k_tick_t timeout)
{
readyqueue_remove(task);
pend_list_add(task, object);
if (timeout != TOS_TIME_FOREVER) {
tick_list_add(task, timeout);
}
}获取任务等待状态的函数,在\kernel\core\tos_pend.c文件的 第 72 行
__KERNEL__ k_err_t pend_state2errno(pend_state_t state)
{
if (state == PEND_STATE_POST) {
return K_ERR_NONE;
} else if (state == PEND_STATE_TIMEOUT) {
return K_ERR_PEND_TIMEOUT;
} else if (state == PEND_STATE_DESTROY) {
return K_ERR_PEND_DESTROY;
} else if (state == PEND_STATE_OWNER_DIE) {
return K_ERR_PEND_OWNER_DIE;
} else {
return K_ERR_PEND_ABNORMAL;
}
}(消息)写入队列
任务或者中断服务程序都可以给消息队列发送消息,当发送消息时,TencentOS tiny会从消息池中取出一个消息,挂载到队列的消息列表末尾(FIFO发送方式)。tos_queue_post()是唤醒一个等待队列消息任务,tos_queue_post_all()则会唤醒所有等待队列消息的任务,无论何种情况,都是调用queue_do_post将消息写入队列中。
消息的写入队列过程:
- 首先检测传入的参数是否正确
- 判断一下是否有任务在等待消息,如果有则根据
opt参数决定唤醒一个任务或者所有等待任务,否则直接将消息写入队列中。 - 当没有任务在等待消息时,调用
tos_msg_queue_put()函数将消息写入队列,写入队列的方式遵循FIFO原则(TOS_OPT_MSG_PUT_FIFO),写入成功返回K_ERR_NONE。而如果消息池已经没有消息了(消息最大个数由TOS_CFG_MSG_POOL_SIZE宏定义决定),则写入失败,返回K_ERR_QUEUE_FULL错误代码。(关于该函数将在下一章讲解) - 如果有任务在等待消息,则调用
queue_task_msg_recv()函数将消息内容与大小写入任务控制块的msg_addr与msg_size成员变量中,此外还需要唤醒任务,就通过调用pend_task_wakeup()函数将对应的等待任务唤醒,核心处理思想就是通过TOS_LIST_FIRST_ENTRY获取到等待在队列上的任务,然后唤醒它。 - 对于唤醒所有等待任务的处理其实也是一样的,只不过是多了个循环处理,把等待列表中的所有任务依次唤醒,仅此而已~
写入队列消息函数,在\kernel\core\tos_queue.c 第 159 、164 行
__API__ k_err_t tos_queue_post(k_queue_t *queue, void *msg_addr, size_t msg_size)
{
TOS_PTR_SANITY_CHECK(queue);
TOS_PTR_SANITY_CHECK(msg_addr);
return queue_do_post(queue, msg_addr, msg_size, OPT_POST_ONE);
}
__API__ k_err_t tos_queue_post_all(k_queue_t *queue, void *msg_addr, size_t msg_size)
{
TOS_PTR_SANITY_CHECK(queue);
TOS_PTR_SANITY_CHECK(msg_addr);
return queue_do_post(queue, msg_addr, msg_size, OPT_POST_ALL);
}
写入队列消息函数实际调用的函数,通过opt参数进行不一样的处理,在\kernel\core\tos_queue.c 第 118 行__STATIC__ k_err_t queue_do_post(k_queue_t *queue, void *msg_addr, size_t msg_size, opt_post_t opt)
{
TOS_CPU_CPSR_ALLOC();
k_list_t *curr, *next;
TOS_PTR_SANITY_CHECK(queue);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
if (pend_is_nopending(&queue->pend_obj)) {
if (tos_msg_queue_put(&queue->msg_queue, msg_addr, msg_size, TOS_OPT_MSG_PUT_FIFO) != K_ERR_NONE) {
TOS_CPU_INT_ENABLE();
return K_ERR_QUEUE_FULL;
}
TOS_CPU_INT_ENABLE();
return K_ERR_NONE;
}
if (opt == OPT_POST_ONE) {
queue_task_msg_recv(TOS_LIST_FIRST_ENTRY(&queue->pend_obj.list, k_task_t, pend_list),
msg_addr, msg_size);
} else { // OPT_QUEUE_POST_ALL
TOS_LIST_FOR_EACH_SAFE(curr, next, &queue->pend_obj.list) {
queue_task_msg_recv(TOS_LIST_ENTRY(curr, k_task_t, pend_list),
msg_addr, msg_size);
}
}
TOS_CPU_INT_ENABLE();
knl_sched();
return K_ERR_NONE;
}唤醒等待的任务函数,在\kernel\core\tos_pend.c文件 的第 87 行
唤醒等待任务的思想就是将任务从对应的等待列表移除,然后添加到就绪列表中。
__KERNEL__ void pend_task_wakeup(k_task_t *task, pend_state_t state)
{
if (task_state_is_pending(task)) {
// mark why we wakeup
task->pend_state = state;
pend_list_remove(task);
}
if (task_state_is_sleeping(task)) {
tick_list_remove(task);
}
if (task_state_is_suspended(task)) {
return;
}
readyqueue_add(task);
}总结
代码精悍短小,思想清晰,非常建议深入学习~
喜欢就关注我吧!

更多资料欢迎关注“物联网IoT开发”公众号!

