
专注旷视研究院学术论文解读推送,涵盖计算机视觉,文字识别等
我们刚开始拿到的图片集是xxx1.jpg xxx2.jpg 。。。堆集在一个目录的图片,其中1表示左摄像头,2表示右摄像头。
在上面一篇文章中,我们对训练代码中的inputs和outputs获得做了简单分析。有了inputs和outpus后,就可以开始计算loss值了。这也是本文重点。
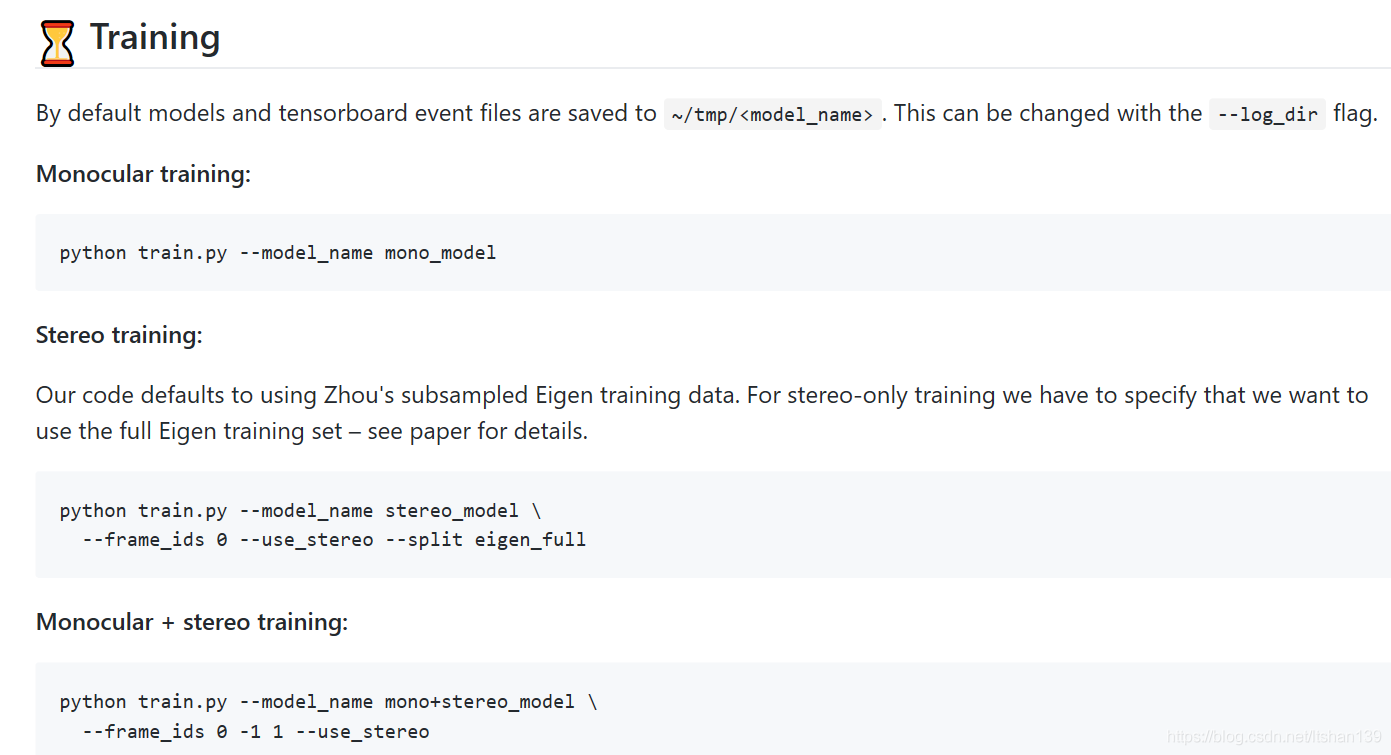
在系列七中,我们提到了train.py中实际上只有两行训练相关的代码,第一行是Trainer构造函数的调用,主要是初始化和数据集的构建,系列七主要是对这个过程进行了梳理。第二行是Trainer成员函数train的执行,这个是训练真正执行部分,本文着重来对它进行分析。
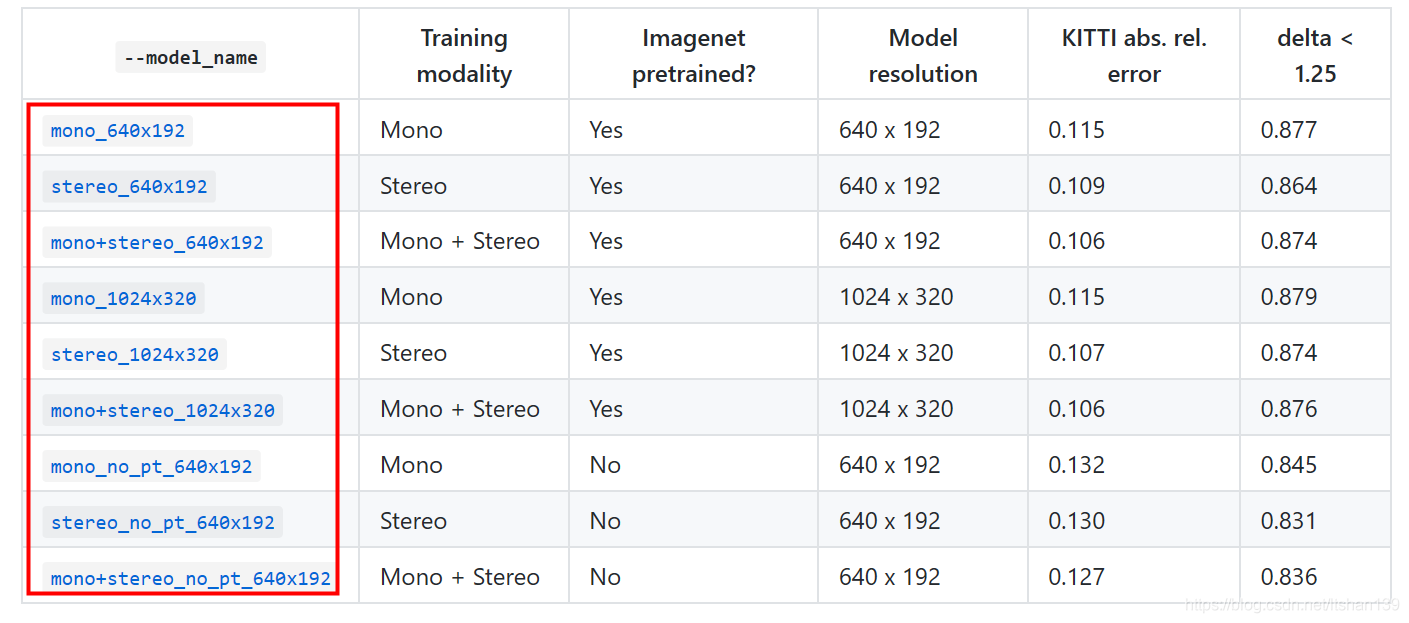
上一篇文章说过,monodepth2模型有三种训练方式。针对我们的双目场景,准备使用stereo training方法。
在darknet框架中,有两个nms函数:do_nms_obj和do_nms_sort()。 在test_detector()函数中用的是do_nms_sort(), 而在darknet.py中用的是 do_nms_obj()。 值得注意的是,它们的运行结果会导致最终检测框不太一样。 有必要在这里结合代码解释一下,希望引起大家注意。
monocular是单目的意思,而双目的英文则是binocular。现在基于深度学习方法对单目图像重构出三维世界非常流行。我个人觉得这里面的基础理论是SFM(structure From Motion)。直白讲,它是依靠运动视频的图像帧序列来进行三维重建。其优势很明显,只需要一个摄像头即可,当然前提条件则是,需要摄像头本身动起来,拍一段...
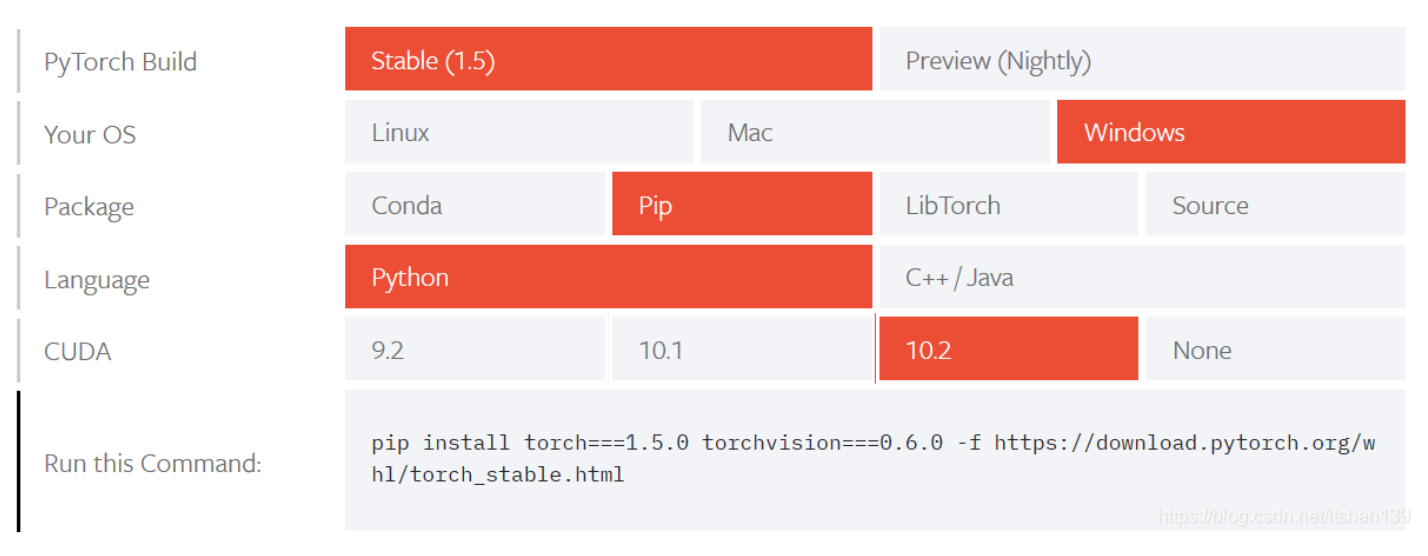
在window上安装pytorch虽然比caffe容易得多,但是也遇到了各种各样得坑,这里我把自己遇到的坑记录分享一下。
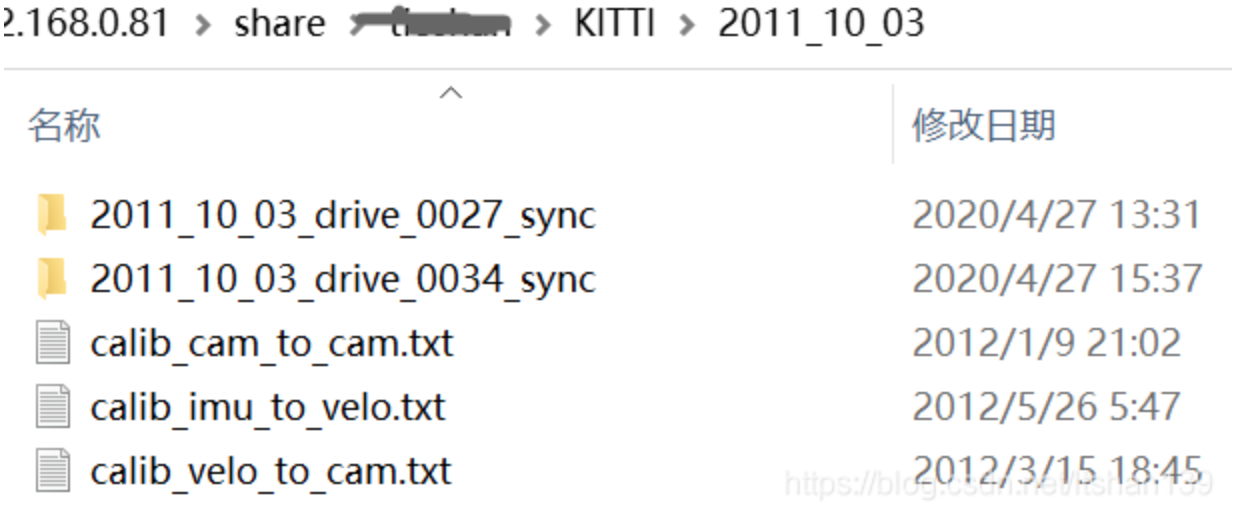
monodepth模型是基于KITTI数据集来训练的。为了能复现这个训练过程,从而为以后训练自己数据集奠定较好的基础,还是需要把这个数据集下载到本地,并成功训练。
基于张正友标定方法的双目测距在远距离尤其是室外环境复杂,光照影响强烈的场景下会出现准确度,稳定性以及鲁棒性明显下降的缺点。所以个人认为,双目测距未来的发展趋势还是深度学习技术的引入。 就双目测距而言,深度学习有两大分支:一个是监督学习,即样本图片本身带有深度信息;另外一个是无监督和自监督学习,即样...
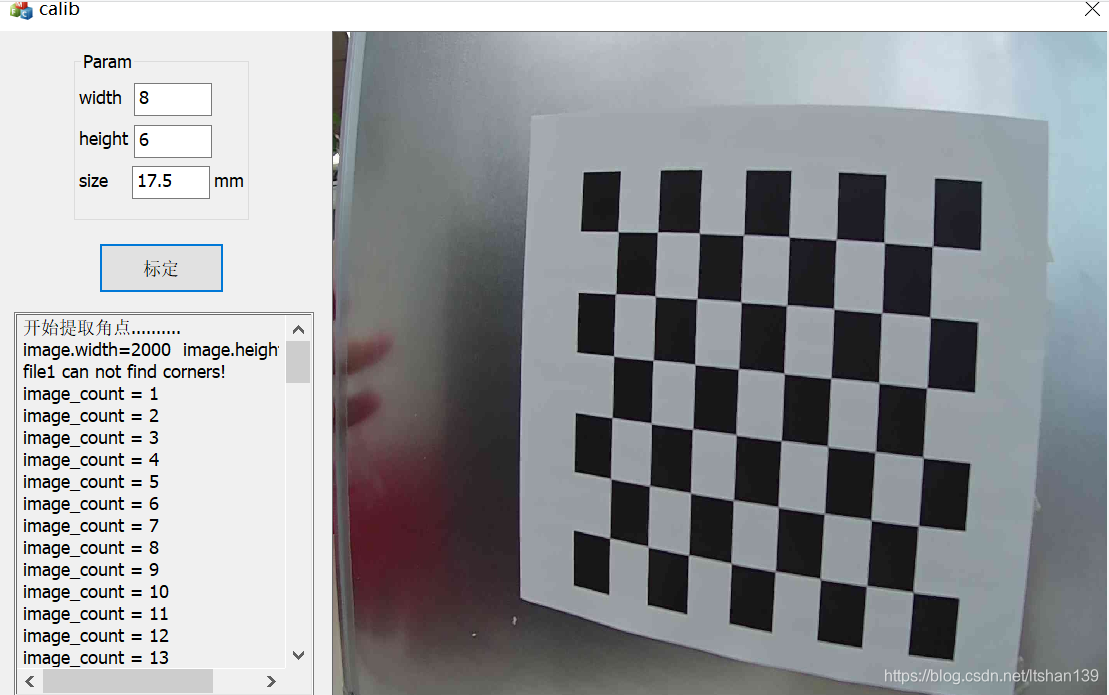
这几天把基于opencv C++ api将鱼眼镜头的双目标定以及测距功能实现完毕,效果还可以,至少对齐得非常棒。 这里把其流程及其关键函数在这里总结一下。对于双目标定而言,opencv一共支持两种模型:普通针孔相机模型和鱼眼相机模型fisheye。后者是opencv3.0后才开始支持的。从使用角度讲,它俩主要差别就在于畸变系数不一样...
双目摄像头标定是测距及其三维建模非常重要的步骤,因为标定出来的内外参数将会用来对原始图像进行反畸变校正,而反畸变的效果对立体匹配精度有着非常大的影响。此外,最终在求距离时(其公式为l=B*f/d),这里面参数都和标定息息相关。
精心准备一个月,终于推出新的课程《SSD和MobilenetSSD模型的训练,量化以及在海思芯片上的部署》(链接:[链接])
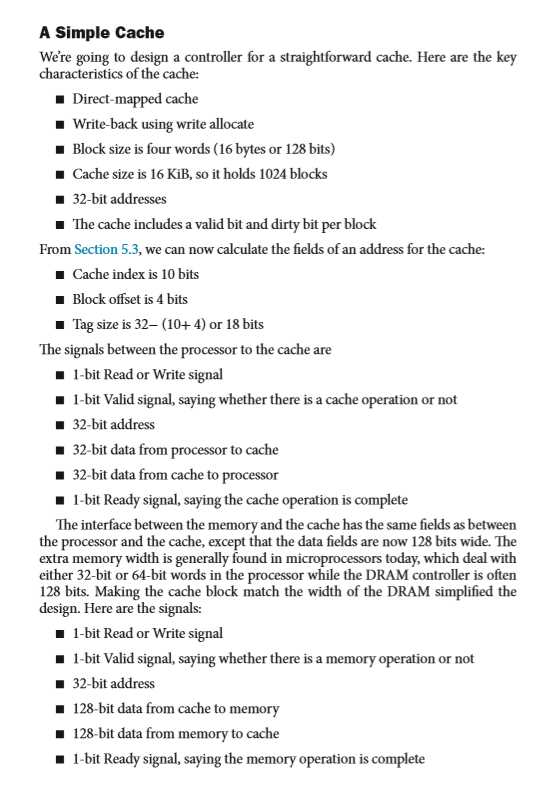
本文使用 Zhihu On VSCode 创作并发布翻译与整理于《计算机组成与设计 硬件软件接口》(第五版)章 5.12 进阶内容:实现 cache 的前半部分。该章为在线内容,链接:[链接]本节基于书中第 5.9 节讨论的缓存设计方案,采用 SystemVerilog 实现一个简单的 cache ,源代码组织为八个图表。注:书中代码以图表形式组织,译者...
转载自:《华为海思35xx开发板的SDK环境搭建》视频课程的介绍作者:ltshan139前言本课程主要是介绍海思开发板SDK的环境搭建过程。课程链接:[链接]课纲课程主要分为六大章:1)介绍课程内容、特色、目标以及答疑2)对3519av100 020版本的SDK进行梳理,并对交叉编译toolchain和sdk进行安装3)编译uboot代码以及使用tftp和...
本课程基于实际开发项目中的无人零售数据集来手把手教大家来训练yolov3 tiny模型,并且详细讲解将训练出来的模型如何移植到海思平台。
以前讲的算法模型课程里面都是以bgr数据格式为输入进行讲解的。但实际应用中,往往为拍摄到的jpeg图片。从jpeg图片转换成nnie可以推理的数据格式,这中间还是有些开发工作量的。
沉寂两个月,终于将新的视频课程\<\<基于海思35xx nnie引擎进行经典目标检测算法模型推理\>\>发布出来。它可以看成是上一门视频课程<<基于海思35xx上nnie加速引擎进行yolov3算法模型推理>>的姐妹篇。即在SDK和yolov3模型详细讲解的基础上,我们进行了扩充和延申。
云芯一号是极术社区推出的arm微服务器开发平台,基于rk3399 SoC(双A72+四A53+Mali-T864),支持Ubuntu server 18.04,是一款兼顾高性能和低功耗的开发板。收到极术社区寄送的开发板之后,就马上开箱体验了一下

美国政府最近对华为技术公司的镇压行动,揭示了在全球芯片制造行业,来自美国的公司是如何成为特朗普政府限制芯片产业向中国科技巨头供货的关键。


