
摘要:上一章介绍了永磁同步电机的从三相相差120°静止坐标系到两相静止坐标系和旋转坐标系的坐标变换,三相逆变器的SVPWM调制技术,并给出了位置开环控制,实现了永磁同步电机像直流电机一样转动起来,本章将介绍在外部磁传感器获取转子真正位置后,如何实现电机转子的定向磁场控制(FOC)。
1.数学模型
中学时学过电机是一个将电能转换为机械能的装置,但实际的转化路径会复杂一些:电能->磁场能->机械能,因此电机的数学模型包括电压方程、磁链方程和转矩方程。旋转的电压产生了旋转的电流,旋转的电流产生了旋转的磁场,旋转的磁场和永磁体的磁场相互作用,产生了旋转力矩,电机内的电压、电流和磁链是转速相同,相位不同的矢量。
a. 磁链方程:
磁链是表征磁场的物理量,在永磁同步电机内,磁场来源于转子永磁体和定子线圈,在(d,q)坐标系下,磁链方程的表达式非常简洁,如图1所示: 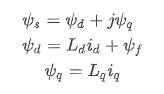
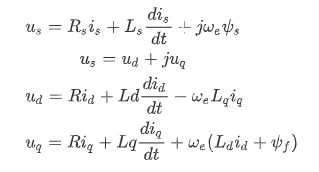
b. 电压方程:
在电机旋转过程中,磁链会产生反电动势e,在电阻、电感基础上,把磁链方程代入电压方程,可得(d,q)坐标系下电压方程如图2所示: 
c.力矩方程:
电机本质上是一个将电能转化为机械能的装置,电机的电复功率如图3所示: 
下面逐项分析复功率,目标是得到电机的有功功率,直观上来说,电阻上的功率以热的形式损耗,无法转换为机械功率,而电感只是存储能量,电感上的功率属于无功功率,因而电机的有功功率由磁链产生,将磁链和电流的复数形式代入功率公式,得到的实数部分即有功功率,如图4所示: 
教材上电磁转矩公式上的3/2系数来自于\_clark\_变换时幅值变换,因而电磁转矩公式,其中p是极对数,如图5所示: 
在表贴式永磁同步电机中,Ld和Lq相等,公式更为简洁,电磁转矩只和磁链、iq相关,因此在表贴式永磁同步电机中,常常采用id=0,控制iq的控制方式。
2.PI控制
表贴式永磁同步电机控制框图如图6所示,外环为转速环,内环为电流环。 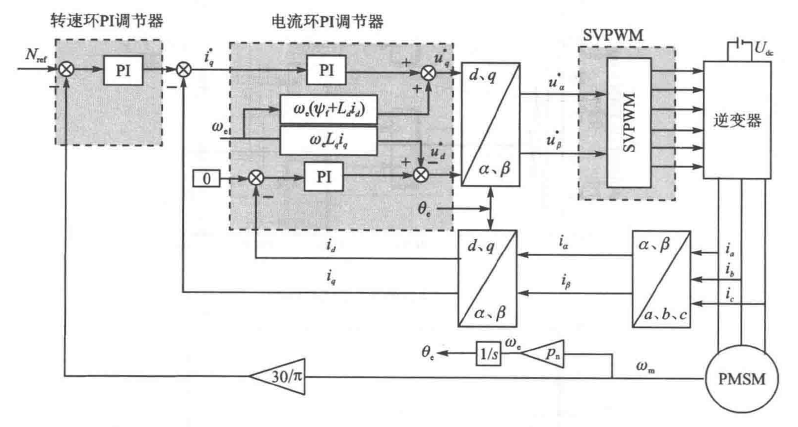
电流环参数由电气参数R、L决定,转速环参数由转动惯量和机械带宽决定,PI参数一律采用带宽法进行归一化处理。
永磁同步电机绕组可视为电阻R和电感L的串联电路,如图2所示,这是一个典型的一阶惯性系统,因而可将电流环PI的零点设置为RL一阶系统的极点,校正闭环系统,得到非常稳定、不含谐振峰的响应,确定电流环PI的零点后,将确定电流环PI的带宽,电流环带宽明确小于截止频率和速度环带宽,设计步骤如图7所示: 
由于转动惯量和摩擦系数的难以测量,速度环PI参数的确定将难于电流环,需要借助于调参的手段:
- 先只设置Kp,然后按30%的增量递增,直到出现速度阶跃响应出现震荡;
- 然后将Kp参数退回到50%;
- 然后根据需求设定Ki参数为Bandwidth*Kp/2,一般情况下速度环带宽设置在10Hz左右即可满足响应要求;
- 速度环执行周期通常设置在电流环的1/2或1/4;
实际情况下d轴和q轴的电流控制并不是相互独立的,在电机内部d轴电压会对q轴电流产生影响,反之亦然,很明显的可以从电压方程中看出这一点。这中交叉耦合效应会造成意外的干扰,尤其在速度环、电流环带宽较高的情况下,要修正这类交叉耦合项,可借助前馈修正电流环PI输出的d轴电压和q轴电压,修正后的d轴和q轴电流环就像是控制两个直流电机一样。 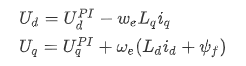
参考文献:
[1].7217.InstaSPIN user guide ZHCU083.
[2].https://zhuanlan.zhihu.com/p/45757542.
[3].电机控制解析\\_梁江枫
更多电机控制技术干货请关注电机控制技术专栏。扫描下方二维码加入电机控制技术交流群与作者交流,如二维码失效请添加极术小姐姐微信(id:aijishu20),备注电机控制,加入微信群。


