前言:无感控制策略是电机控制中的研究热点之一,接下来分几期文章做一个PMSM的无感专题。通过理论和验证两个角度进行对介绍的方法策略进行解读。
前言:无感控制策略是电机控制中的研究热点之一,接下来分几期文章做一个PMSM的无感专题。通过理论和验证两个角度进行对介绍的方法策略进行解读。
前言:在电机控制中,SVPWM 必须要加入一段死区时间来防止 IGBT 的上下桥臂直通而造成炸机的可能。但死区时间的引入也会造成电机控制性能劣化,特别是在低速区域时造成电压、电流波形畸变。本期文章介绍一种基于电压补偿法的策略来降低死区时间的影响,并进行对应的验证说明该方法的可行性和有效性。

前言:电流环作为控制系统的内环,其性能的优劣直接决定了伺服系统外环控制性能的好坏。因此在对控制系统的转速环控制器设计之前,需对电流环进行详细地分析以保证其控制性能。对于电流环的优化设计,一般从解耦和解决延时来入手。接下来介绍三种优化措施:电压前馈解耦、串联型 PI 调节器和设计复矢量电流调节器。本章...

前言:本章主要介绍系统标幺化处理和 Q 格式化相关的内容,并进行仿真建模分析验证。那控制系统为什么要进行标幺化处理?由控制芯片决定(定点型芯片)的和通用型控制器要适配各种功率电机,而电机数学模型是一样的,经过标幺化处理则可以满足通用的需求。
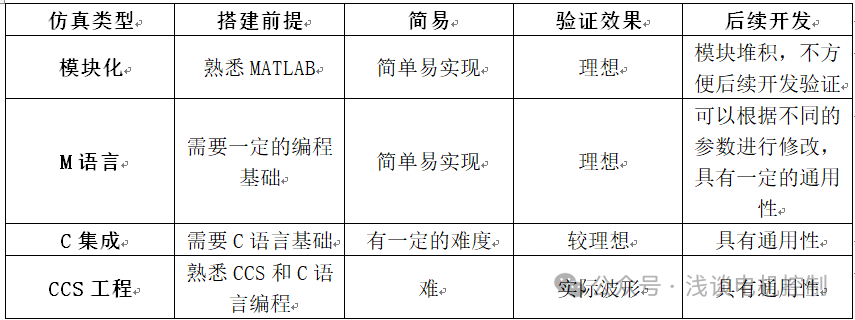
前言:电机控制的开发验证有多种途径和方式,常见的分为模型仿真验证和硬件测试两大类。接下来以 MATLAB+CCS 的 IDE 开发环境来进行仿真模型框架的搭建和对比。
导读:为了在基频以上使电机仍然满足电压、电流的约束条件而稳定运行,控制策略上必须做出调整(MPTAàMTPV)。常见的弱磁控制都是基于改变直轴、交轴电流进行完成扩速的目的,本文介绍常见的单电流调节器&&变交轴电压的弱磁方式,并通过仿真进行验证。

导读:本期文章主要介绍 DSP28335 的 ADC 采样控制外设模块。在电机控制中对电流、电压的采样和处理是重要的环节之一。F28335 提供了丰富的 AD 采样资源,可以有效地获取电压和电流。

选用的控制芯片是 DSP28335,后续会系统的梳理该芯片的外设及相关的性能配置。依托 CCS 和 MATLAB 开发环境,验证关于永磁、异步电机相关的控制算法。

导读:本章文章主要重点介绍一下内置式永磁同步电机的MTPA。通过仿真与id=0的控制策略进行对比,MTPA的动态性能明显优于前者。

导读:在全速域范围内,一般的永磁同步电机无感控制要分为低速区域和高速区域两个部分。原因在于常规的方法是利用模型建立反电动势观测器来求解转子位置信息,但其只适合在中高速区域。本文介绍一种基于滑膜观测器SMO法+PLL的方法。

导读:载永磁无感控制中,锁相环PLL的作用是将观测器得到的反电势或者估计角度转换成估计转速和位置。对锁相环PLL原理的学习和PI参数的整定是永磁无感中的重要一个环节。

导读:表贴式和内置式永磁同步电机因为结构不同,反电势观测器的实现方式就有所不同。本期文章主要介绍一下内置式永磁同步电机扩展反电势EMF观测器的数学模型,并用在无感控制中。

导读:上期文章介绍的基于EMF+PLL的中高速永磁无感控制,其中决定转速和位置的估算精度的是反电势的获取。直接计算法很难保证反电势的估算精度,所以本期文章介绍一种基于LPF的改进型EMF观测器。

导读:在全速域范围内,一般的永磁同步电机无感控制要分为低速区域和高速区域两个部分。原因在于常规的方法是利用模型建立反电动势观测器来求解转子位置信息,但其只适合在中高速区域。本文介绍一种back-EMF+PLL的方法。

导读:针对永磁同步电机模型预测转矩控制(MPTC)成本函数中权重系数设计繁琐问题,本文介绍一种模型预测磁链控制(MPFC),能够消除成本函数中的权重系数。通过仿真对比验证,MPFC的能够抑制转矩脉动和定子磁链脉动,具有与MPTC最优控制相当的动、静态性能,算法运算量显著降低。

导读:本期文章主要介绍永磁同步电机双矢量模型预测转矩控制。由于传统直接转矩控制和单矢量的模型预测转矩控制转矩纹波较大,且在全速范围内的开关频率不固定,针对这一缺陷,引入双矢量MPTC。

电机控制是工程师绕不开话题,合格的工程师在设计之前,一定对整个电机控制拥有丰富的心得体会。本文从同步、定时和软件三方面,详细梳理电机控制的流程及组成,并分享工程师在实际工作中的经验。

导读:本期文章主要介绍一下新能源汽车上各种驱动电机的原理并进行简单分析,同时宣传ATC驱动系统峰会。

导读:本期文章主要介绍永磁同步电机三闭环位置矢量控制。三闭环控制是在双闭环的基础上加了一个位置环对位置角进行控制。那为什么要加位置环呢?因为控制系统的需求变了,双闭环要求转速的变化,而三闭环则要求转到指定的位置。本文主要介绍一下三闭环的位置环的原理和实现的过程。



