
1.摘要
GD32F310是一款基于 Arm® Cortex®-M4 RISC 内核的32 位通用微控制器,最高主频可达72MHz并支持DSP指令运算。配备了16KB到64KB的内置Flash及4KB到8KB的SRAM,整合了丰富的外设,包括1个支持三相PWM互补输出和死区管理功能的16位高级定时器可用于矢量控制,多达5个16位通用定时器, 1个12位ADC,可使GD32F310系列广泛应用于永磁同步电机控制领域。本文将介绍应用于电机控制时,高级定时器和ADC的配置过程。
2.底层驱动配置
GD32F310中的高级定时器TIMER0是一个四通道16位定时器,同时支持向上计数、向下计数和中央计数,可编程的计数器重复功能,并包含了一个死区时间插入模块,可以生成两路互补的PWM波,非常适应电机控制,因而使用TIMER0生成三组六路PWM波来驱动三相逆变桥,如图1所示。 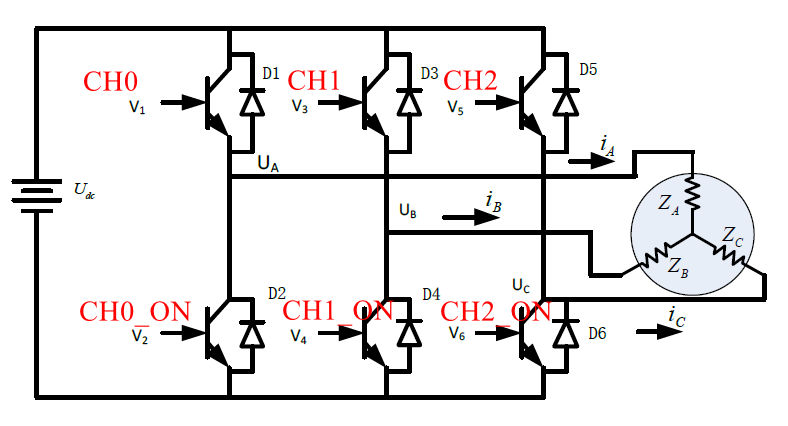
在驱动三相逆变器的同时需要配合采样永磁同步电机A、B、C三相电流,通常为节省成本,将采样电阻设置在逆变器的下桥臂,因此配置触发ADC采样的时机就显的非常关键,须在下桥臂打开时采样三相电流。在电机控制中,通常将高级定时器TIMER0配置为中央计数模式,ADC采样的时刻和其中一相的上下桥臂PWM如图2所示。 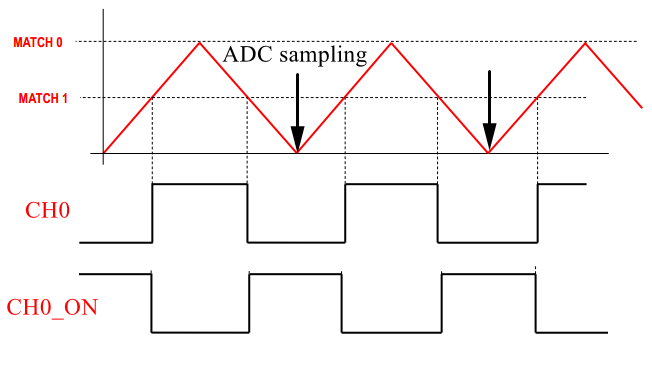
配置要点是:
- 高级定时器TIMER0配置为中央计数模式,并在计数值接近到零处触发ADC采样三相电流;
- 在高级定时器TIMER0输出的两路PWM中插入死区时间,通常在20kHZ的PWM中设置100ns的死区;
- 电机的两相电流的ADC采样模块配置为注入通道组,在触发ADC采样后,同时采样电机的两相电流值;
- 在ADC采样完成后,进行FOC运算;
具体配置代码如下:
uint32_t dummy = 0;
timer_parameter_struct timer_initpara;
timer_oc_parameter_struct timer_ocintpara;
timer_break_parameter_struct timer_bkdtpara;
/************************************* step0: 开启时钟 *******************************************/
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_TIMER0);
rcu_periph_clock_enable(RCU_ADC);
rcu_adc_clock_config(RCU_ADCCK_APB2_DIV2);
/************************************* step1: GPIO配置 *******************************************/
/* 配置6路PWM的IO */
gpio_mode_set(GPIOA, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_8);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);
gpio_af_set(GPIOA, GPIO_AF_2, GPIO_PIN_8);
gpio_mode_set(GPIOA, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_9);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9);
gpio_af_set(GPIOA, GPIO_AF_2, GPIO_PIN_9);
gpio_mode_set(GPIOA, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_10);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_10);
gpio_af_set(GPIOA, GPIO_AF_2, GPIO_PIN_10);
/* 驱动使能 */
gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_5);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_5);
gpio_bit_reset(GPIOA, GPIO_PIN_5);
/* 配置电流采样的IO */
gpio_mode_set(GPIOA, GPIO_MODE_ANALOG, GPIO_PUPD_NONE, GPIO_PIN_1);
gpio_mode_set(GPIOA, GPIO_MODE_ANALOG, GPIO_PUPD_NONE, GPIO_PIN_2);
/************************************* step2: timer配置 ******************************************/
timer_deinit(TIMER0);
timer_initpara.prescaler = PWM_PRSC;
timer_initpara.alignedmode = TIMER_COUNTER_CENTER_DOWN;
timer_initpara.period = HALF_PWM_PERIOD; /* 配置三相桥开关频率 */
timer_initpara.clockdivision = TIMER_CKDIV_DIV2; /* 死区时间计算用到的分频 */
timer_initpara.repetitioncounter = 1; /* 重复计数器, 影响更新事件的频率 */
timer_init(TIMER0, &timer_initpara);
timer_ocintpara.outputstate = TIMER_CCX_ENABLE;
timer_ocintpara.outputnstate = TIMER_CCXN_ENABLE;
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;
timer_ocintpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;
timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW;
timer_ocintpara.ocnidlestate = TIMER_OCN_IDLE_STATE_LOW;
timer_channel_output_config(TIMER0, TIMER_CH_0,&timer_ocintpara);
timer_channel_output_config(TIMER0, TIMER_CH_1,&timer_ocintpara);
timer_channel_output_config(TIMER0, TIMER_CH_2,&timer_ocintpara);
timer_ocintpara.outputstate = TIMER_CCX_ENABLE;
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;
timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW;
timer_channel_output_config(TIMER0, TIMER_CH_3,&timer_ocintpara);
/* channel1~3 */
timer_channel_output_pulse_value_config(TIMER0, TIMER_CH_0, HALF_PWM_PERIOD/2);
timer_channel_output_mode_config(TIMER0, TIMER_CH_0, TIMER_OC_MODE_PWM1);
timer_channel_output_shadow_config(TIMER0, TIMER_CH_0, TIMER_OC_SHADOW_ENABLE); /* 预装载使能 */
timer_channel_output_pulse_value_config(TIMER0, TIMER_CH_1, HALF_PWM_PERIOD/2);
timer_channel_output_mode_config(TIMER0, TIMER_CH_1, TIMER_OC_MODE_PWM1);
timer_channel_output_shadow_config(TIMER0, TIMER_CH_1, TIMER_OC_SHADOW_ENABLE); /* 预装载使能 */
timer_channel_output_pulse_value_config(TIMER0, TIMER_CH_2, HALF_PWM_PERIOD/2);
timer_channel_output_mode_config(TIMER0, TIMER_CH_2, TIMER_OC_MODE_PWM1);
timer_channel_output_shadow_config(TIMER0, TIMER_CH_2, TIMER_OC_SHADOW_ENABLE); /* 预装载使能 */
/* channel4 设置, 触发ADC用 */
timer_channel_output_pulse_value_config(TIMER0, TIMER_CH_3, 5);
timer_channel_output_mode_config(TIMER0, TIMER_CH_3, TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER0, TIMER_CH_3, TIMER_OC_SHADOW_ENABLE); /* 预装载使能 */
timer_master_output_trigger_source_select(TIMER0, TIMER_TRI_OUT_SRC_O3CPRE); /* 上升沿触发ADC */
/* 配置死区 */
timer_bkdtpara.runoffstate = TIMER_ROS_STATE_ENABLE;
timer_bkdtpara.ideloffstate = TIMER_IOS_STATE_ENABLE;
timer_bkdtpara.protectmode = TIMER_CCHP_PROT_0;
timer_bkdtpara.deadtime = DEADTIME;
timer_bkdtpara.breakstate = TIMER_BREAK_DISABLE;
timer_bkdtpara.breakpolarity = TIMER_BREAK_POLARITY_LOW;
timer_bkdtpara.outputautostate = TIMER_OUTAUTO_DISABLE;
timer_break_config(TIMER0, &timer_bkdtpara);
/* 多电机控制同步用的 */
timer_input_trigger_source_select(TIMER0, TIMER_SMCFG_TRGSEL_ITI1);
timer_slave_mode_select(TIMER0, TIMER_SLAVE_MODE_EVENT);
timer_event_software_generate(TIMER0, TIMER_EVENT_SRC_UPG);
timer_counter_value_config(TIMER0, 0);
/* 只需要CC4使能 */
timer_channel_output_state_config(TIMER0, TIMER_CH_0, TIMER_CCX_DISABLE);
timer_channel_output_state_config(TIMER0, TIMER_CH_1, TIMER_CCX_DISABLE);
timer_channel_output_state_config(TIMER0, TIMER_CH_2, TIMER_CCX_DISABLE);
timer_channel_output_state_config(TIMER0, TIMER_CH_3, TIMER_CCX_ENABLE);
timer_channel_complementary_output_state_config(TIMER0, TIMER_CH_0, TIMER_CCXN_DISABLE);
timer_channel_complementary_output_state_config(TIMER0, TIMER_CH_1, TIMER_CCXN_DISABLE);
timer_channel_complementary_output_state_config(TIMER0, TIMER_CH_2, TIMER_CCXN_DISABLE);
timer_update_source_config(TIMER0, TIMER_UPDATE_SRC_REGULAR);
timer_single_pulse_mode_config(TIMER0, TIMER_SP_MODE_REPETITIVE);
timer_primary_output_config(TIMER0,ENABLE);
timer_auto_reload_shadow_enable(TIMER0);
timer_enable(TIMER0);
dbg_periph_enable(DBG_TIMER0_HOLD);
/************************************** step3: adc配置 *******************************************/
adc_deinit();
adc_special_function_config(ADC_SCAN_MODE, ENABLE);
adc_special_function_config(ADC_CONTINUOUS_MODE, DISABLE);
adc_external_trigger_source_config(ADC_REGULAR_CHANNEL, ADC_EXTTRIG_REGULAR_NONE);
adc_data_alignment_config(ADC_DATAALIGN_RIGHT);
/* 注入组配置 */
adc_channel_length_config(ADC_INSERTED_CHANNEL, 2);
adc_inserted_channel_config(0, ADC_CHANNEL_1, ADC_SAMPLETIME_7POINT5); /* A相电流 */
adc_inserted_channel_config(1, ADC_CHANNEL_2, ADC_SAMPLETIME_7POINT5); /* B相电流 */
adc_external_trigger_source_config(ADC_INSERTED_CHANNEL, ADC_EXTTRIG_INSERTED_T0_CH3);
adc_external_trigger_config(ADC_INSERTED_CHANNEL, ENABLE);
adc_enable();
for(dummy = 0; dummy < 60000; dummy++);
adc_calibration_enable();
adc_interrupt_enable(ADC_INT_EOIC);
nvic_irq_enable(ADC_CMP_IRQn, ADC_PRE_PRIORITY, ADC_SUB_PRIORITY);
3.让电机转动
参考《2.有感FOC——永磁同步电机控制》,获取转子位置后可实现永磁同步电机电角度以10Hz频率运动,如图3所示。

4.让电机演奏
参考英飞凌公众号文章《如何打造一台会演奏音乐的电机》和《4.无感FOC之高频注入法——永磁同步电机控制》,向电机注入不同频率的电压信号,按乐谱进行组合,就可以控制电机演奏不同的歌曲,音频如图4所示。
《送别》

