mindshare_zenon
今天是儿童节,不知道大家都是怎么度过的呢?不妨试一试用AI 来一键体验返老还童的快乐吧!那么首先李彦宏小时候会长什么样呢?亲自上手试一下:嗯,还行吧!那接着试试马化腾:虽然年纪变小了不少,但依旧保持着他的神貌,只是多了些婴儿肥和稚气。这是什么霍格沃茨魔法特效吗?哦不,这其实就是最近在抖音大火的AI特效...

论文地址: [链接]代码地址: [链接]图像级弱监督语义分割是一个具有挑战性的问题,近年来已得到深入研究。大多数弱监督语义分割的解决方案都利用类激活特征图(CAM)。但是,由于完全监督和弱监督之间的差距并且CAM只能发现目标最具判别力的部分,所以利用CAM作为监督信息训练出的语义分割网络始终与真正的ground truth作...
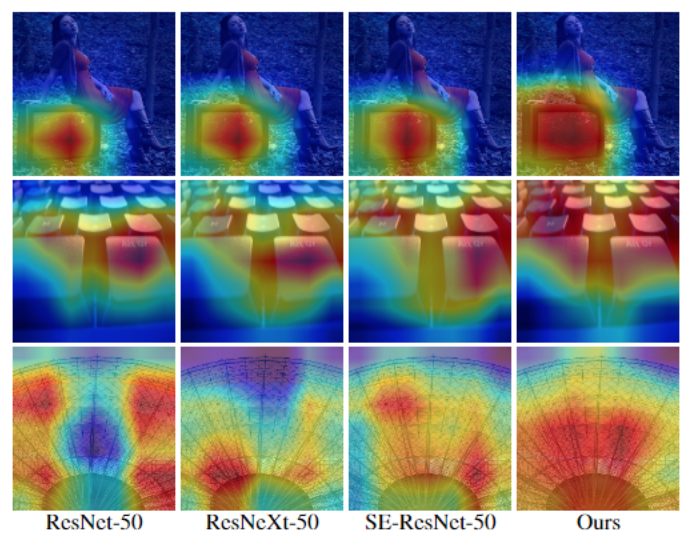
本文《Improving Convolutional Networks with Self-calibrated Convolutions》被CVPR2020收录,是南开大学程明明团队新工作,上次关注他们的工作还是在将多尺度引入Resnet中的Res2Net。另外,最近各种卷积模块工作层出不穷,性能涨点明显,包括李沐等人大神提出的ResNeSt、华为提出的DyNet、谷歌提出的CondConv、清华大...
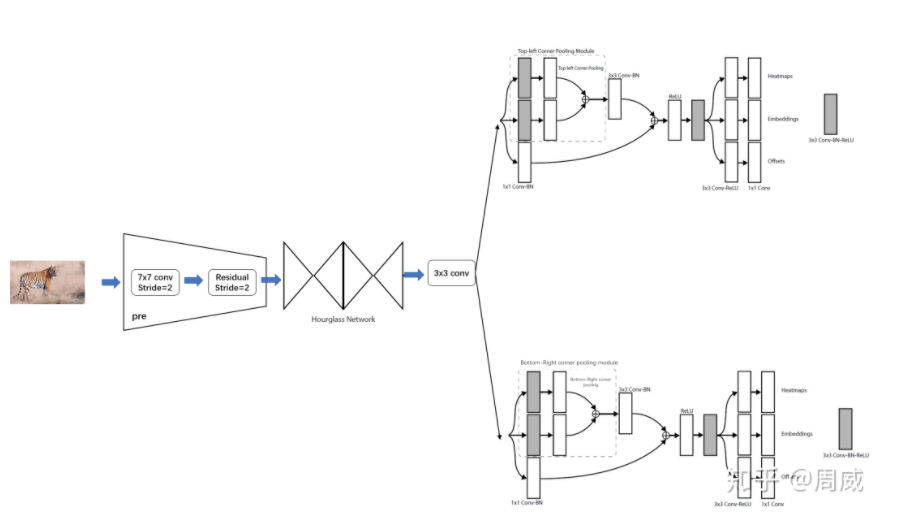
作者:周威首发:AI算法修炼营1 前言本文接着上一讲对CornerNet的网络结构和损失函数的解析,链接如下[链接] https://zhuanlan.zhihu.com/p/195517472本文来聊一聊Anchor-Free领域耳熟能详的CenterNet。原论文名为《Objects as Points》,有没有觉得这种简单的名字特别霸气,比什么"基于xxxx的xxxx的xxxx论文"帅气多了哈...
作者:SFXiang首发:AI算法修炼营本文是我在浏览CVPR2020文章中发现的一篇有趣的有关玻璃检测的文章,平常很少有人关注玻璃检测有关的任务,可以说是开辟一个新的方向,具有巨大的应用价值,准确识别并分割出场景中的玻璃,不仅能够消除由于玻璃的透明性所导致的对于场景的错误理解,还能够帮助其他的计算机视觉任务(例...

今天给大家介绍一篇图像超分辨率邻域的综述,这篇综述总结了图像超分辨率领域的几方面:problem settings、数据集、performance metrics、SR方法、特定领域应用以结构组件形式,同时,总结超分方法的优点与限制。讨论了存在的问题和挑战,以及未来的趋势和发展方向。

这是一篇关于图像分割损失函数的总结,具体包括:Binary Cross EntropyWeighted Cross EntropyBalanced Cross EntropyDice LossFocal lossTversky lossFocal Tversky losslog-cosh dice loss (本文提出的新损失函数)
这篇文章收录于ECCV2020,由北京大学、商汤科技、香港中文大学提出的基于RGB-D图像的语义分割算法。充分考虑了RGB图像信息和深度信息的互补,在网络结构中引入了视觉注意力机制分别用于特征分离与聚合。最终在室内和室外环境的数据集上都进行了实验,具有良好的分割性能。
该论文利用了城市场景图像的内在特征,并提出了一个通用的附加模块,称为高度驱动的注意力网络(HANet),用于改善城市场景图像的语义分割。
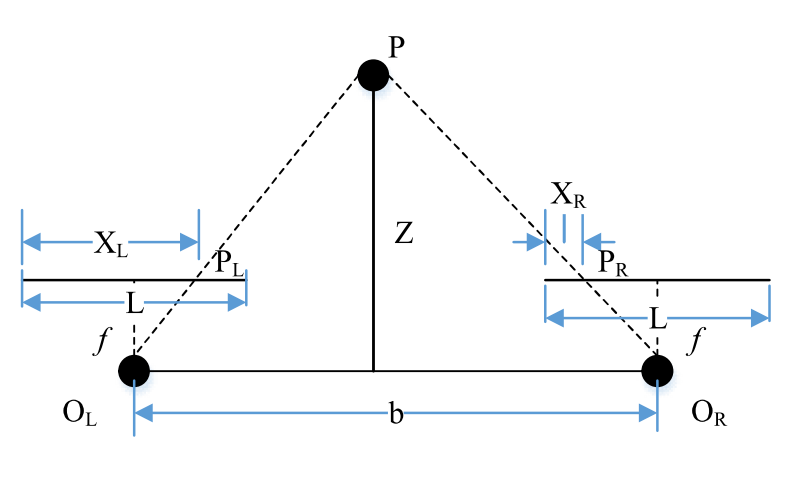
人类具有一双眼睛,对同一目标可以形成视差,因而能清晰地感知到三维世界。因此,计算机的一双眼睛通常用双目视觉来实现,双目视觉就是通过两个摄像头获得图像信息,计算出视差,从而使计算机能够感知到三维世界。一个简单的双目立体视觉系统原理图如图 1 所示。
这篇工作来自华中科技大学和微软亚洲研究院,从结果来看,这篇工作在主流的多目标跟踪数据集上几乎打败之前所有State-of-the-art算法,但标题却称该算法只是个baseline,而且是simple baseline,再次验证大佬们都是谦虚的。

今天这一篇是19年12月30日放到arxiv上的,其实在CVPR2020截止后就一直在关注在关注的一篇文章,毕竟在KITTI的3D检测上高居榜首,并且远远的超过了第二名。如下:

这篇文章的作者是华为加拿大诺亚方舟实验室,是一篇将双向注意力机制用于弹幕深度估计的工作。主要的创新点在视觉注意力机制的基础上引入了前向和后向注意力模块,这些模块可以有效地整合局部和全局信息,以此来消除歧义。这篇文章又扩展了视觉注意力机制的应用范围,值得学习。

本文是收录于CVPR2020的工作,我是被双目图像去雾的题目所吸引的,其实整个工作的创新性不高,但是可以从中学到数据集的制作,图像去雾等基本知识。整体上,也可以看作视觉注意力机制的又一应用。
本文是中科院自动化所、腾讯优图、快手科技联合发表的工作,收录于CVPR2020。对定向和密集场景的目标进行检测,可以说是目标检测在特定场景下的应用与优化。具体的创新点在于特征选择模块通过改进可形变卷积,实现自适应感受野。对分类和回归任务进行动态优化。

这篇文章收录于ECCV2020,是一篇关于无碰撞空间区域分割的文章,整体效果很不错。最主要的核心思想是在表面发现估计器的设计,在得到表面法线后将其用于分割网络的编码器环节,并在特征融合部分,借鉴了DenseNet的思想,进行密集连接。网络的计算量和参数量文中并没有比较,应该做不到实时。
作者:SFXiang首发:AI算法修炼营论文地址:[链接]代码地址:[链接]出自:密歇根大学;深圳大数据研究院本文为Kaggle X光肺炎检测比赛第二名方案。在这项工作中,使用了基于Se-ResNext101为主干网络的RetineNet SSD网络模型, 同时使用了数据增广和多任务学习的技巧来实现肺炎区域的检测。简介肺炎约占全世界5岁以下儿童...

今天来看一下使用的文章,主要的内容是移动机器人用于电梯场景中下,对电梯按钮进行角点检测,并对透视畸变自动去除。整体思路将深度学习方法和传统方法相结合,实现了较好的性能。