
转载自:知乎
作者:真垃圾
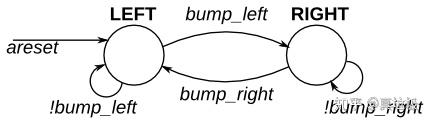
Problem 127 Lemmings1
游戏旅鼠涉及到有非常简单的大脑的生物,我们将会使用有限状态机(FSM)对其建模。
在旅鼠的2D世界中,旅鼠只有两种状态:向左走和向右走。当它遇到一个障碍物的时候,会转变方向。特别是,如果旅鼠被左侧撞到,它将会向右走,被右侧撞到,将会向左走。如果被两侧撞到,它依然会转换方向。
用两状态,两输入,一输出的摩尔型状态机对其行为建模。
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
output walk_left,
output walk_right); //
parameter LEFT=0, RIGHT=1;
reg state, next_state;
always @(*) begin
case(state)
LEFT: next_state = bump_left ? RIGHT:LEFT;
RIGHT:next_state = bump_right? LEFT:RIGHT;
endcase// State transition logic
end
always @(posedge clk, posedge areset) begin
if(areset) state <= LEFT;
else state<=next_state;// State flip-flops with asynchronous reset
end
assign walk_left = (state==LEFT);
assign walk_right= (state==RIGHT);
// Output logic
// assign walk_left = (state == ...);
// assign walk_right = (state == ...);
endmodule
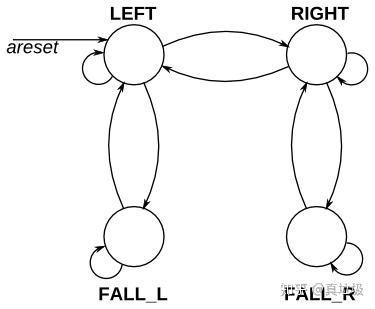
Problem 128 Lemmings2
除了向左和向右,旅鼠在它们脚下地面消失的时候还会掉落(发出“aaah!”)。地面重新出现的时候,旅鼠将会沿着掉落之前的方向继续行走。当旅鼠在地面消失的时候被碰撞(还没有掉落),不会影响步行方向,或者当地面重新出现但旅鼠仍在掉落过程中时,也不会影响步行方向。
用有限状态机(FSM)对此次行为建模。
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
input ground,
output walk_left,
output walk_right,
output aaah );
reg [1:0]state,next;
parameter WL=0,WR=1,FL=2,FR=3;
always @(*)
begin
case(state)
WL: next = ground? ( bump_left ? WR:WL):FL;
WR: next = ground? ( bump_right? WL:WR):FR;
FL: next = ground? WL : FL;
FR: next = ground? WR : FR;
endcase
end
always @(posedge clk or posedge areset)
if(areset) state <= WL;
else state <= next;
always @(*)
case(state)
WL: {walk_left,walk_right,aaah}=3'b100;
WR: {walk_left,walk_right,aaah}=3'b010;
FL: {walk_left,walk_right,aaah}=3'b001;
FR: {walk_left,walk_right,aaah}=3'b001;
endcase
endmodule
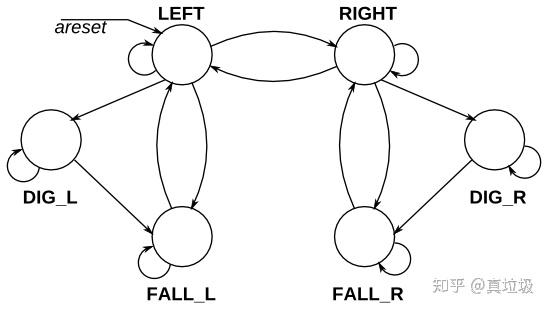
Problem 129 Lemmings3
除了走路和掉落外,旅鼠有时候还能做些有用的事情,比如挖洞(当dig=1时,开始挖洞)
旅鼠在地面的时候(ground=1)它能挖洞,直到到达地面的另一边(ground=0)。在那时,由于没有地面,旅鼠将会下落(发出“aaah”),当它再一次到达地面的时候,继续按照它原来的方向行走。和掉落一样,挖洞过程中被撞击不受影响,而且掉落或者没有地面的时候挖洞命令将会被忽视。
(换句话说,旅鼠能下落、挖洞、或者转变方向。如果多个条件同时满足,优先级是:下落>挖洞>转换方向),扩展你的有限状态机模型来建模其行为。
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
input ground,
input dig,
output walk_left,
output walk_right,
output aaah,
output digging );
parameter WL=0,WR=1,FL=2,FR=3,DL=4,DR=5;
reg [2:0]state,next;
//state transtition logic
always @(*)
begin
case(state)
WL: next = ground? (dig? DL : (bump_left? WR:WL) ):FL;
WR: next = ground? (dig? DR : (bump_right?WL:WR) ):FR;
FL: next = ground? WL : FL;
FR: next = ground? WR : FR;
DL: next = ground? DL : FL;
DR: next = ground? DR : FR;
endcase
end
always @(posedge clk or posedge areset)
if(areset) state <= WL;
else state <= next;
always @(*)
case(state)
WL: {walk_left,walk_right,aaah,digging} = 4'b1000;
WR: {walk_left,walk_right,aaah,digging} = 4'b0100;
FL: {walk_left,walk_right,aaah,digging} = 4'b0010;
FR: {walk_left,walk_right,aaah,digging} = 4'b0010;
DL: {walk_left,walk_right,aaah,digging} = 4'b0001;
DR: {walk_left,walk_right,aaah,digging} = 4'b0001;
endcase
endmodule
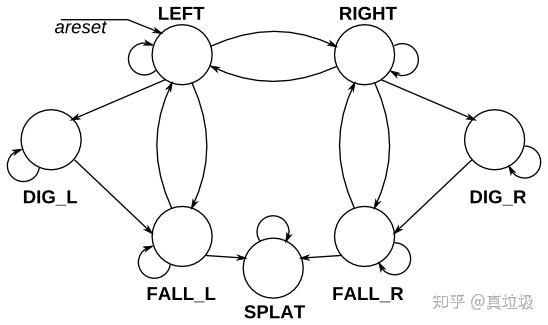
Problem 130 Lemmings4
尽管旅鼠能够行走,掉落,挖洞,但也并非无懈可击。如果旅鼠下落过程过长在落到地面,它会飞溅。特别地,如果旅鼠下落超过20个周期再下落到地面,它将会飞溅,停止行走,掉落和挖掘(所有的4个输出都将为0),除非FSM复位。旅鼠能够下落多远没有上限。旅鼠仅仅会在落到地面的时候飞溅,而不会在半空飞溅。
扩展你的有限状态机模型来建模其行为。
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
input ground,
input dig,
output walk_left,
output walk_right,
output aaah,
output digging );
parameter WL=0,WR=1,FL=2,FR=3,DL=4,DR=5,Splat = 6;
reg [64:0]counter;
reg [2:0]state,next;
always @(*)
case(state)
WL: next = ground ? (dig ? DL: (bump_left?WR:WL)) : FL;
WR: next = ground ? (dig ? DR: (bump_right?WL:WR)) : FR;
FL: next = ground ? (counter>19? Splat : WL) : FL;
FR: next = ground ? (counter>19? Splat : WR): FR;
DL: next = ground ? DL : FL;
DR: next = ground ? DR : FR;
Splat:next = Splat;
endcase
always @(posedge clk or posedge areset)
begin
if(areset) state<=WL;
else if ( state==FL || state == FR )
begin
state <= next;
counter = counter + 1;
end
else begin
state <= next;
counter =0;
end
end
always @(*)
case(state)
WL : {walk_left,walk_right,aaah,digging} = 4'b1000;
WR : {walk_left,walk_right,aaah,digging} = 4'b0100;
FL : {walk_left,walk_right,aaah,digging} = 4'b0010;
FR : {walk_left,walk_right,aaah,digging} = 4'b0010;
DL : {walk_left,walk_right,aaah,digging} = 4'b0001;
DR : {walk_left,walk_right,aaah,digging} = 4'b0001;
Splat: {walk_left,walk_right,aaah,digging} = 4'b0000;
endcase
endmodule
推荐阅读
- HDLBits:在线学习 Verilog (二十四 · Problem 115-119)
- HDLBits:在线学习 Verilog (二十三 · Problem 110-114)
- HDLBits:在线学习 Verilog (二十二 · Problem 105 - 109)
- HDLBits:在线学习 Verilog (二十一 · Problem 100 - 104)
- HDLBits:在线学习 Verilog (二十 · Problem 95 - 99)
关注此系列,请关注专栏FPGA的逻辑

