
1.摘要
永磁同步电机控制中需要实时获取转子位置信息,以保证定子绕组电流矢量和转子位置同步。为了获取转子位置信息,通常通过安装磁编码器或光电编码器等位置传感器。但是安装位置传感器将增加系统成本,而且位置传感器精度通常会受到温度的影响,并且有些特殊应用场合下,无法安装位置传感器。因此无位置传感器控制技术应运而生,简称无感FOC。无感FOC主要包括转子初始位置检测和运行时位置检测两部分。
1.让电机转动起来——永磁同步电机控制
2.有感FOC——永磁同步电机控制
2.运行时位置检测
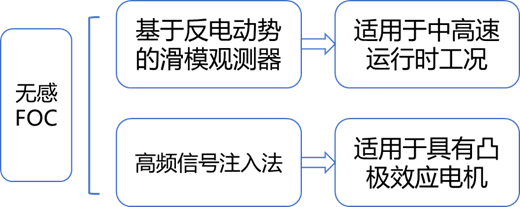
电机运行过程中的转子位置检测技术可分为适用于中高速时观测反电动势的转子位置观测器,和适用于低速或零速时跟踪凸极性的高频信号注入法。两种方法各有千秋,值得说明的是,观测反电动势的方法在低速或零速时失效,是由于电机运行在低速或零速时,磁链产生的反电动势很微弱,可用信号的信噪比太低,因而难以提取转子的位置和速度信息。而高频信号注入法通常只适用于具有凸极性的电机,更适用内置式永磁同步电机或磁密较大的表贴式永磁同步电机,大部分表贴式永磁同步电机由于d轴和q轴的电感近似相等,而无法应用。
3.同步旋转坐标系下滑模观测器
在本节中将引入现代控制理论上至关重要的观测器概念,观测器和熟悉的控制器类似,并不是一种具体的器件,而是对控制系统中的传感器的一种补充,在控制系统中,有些物理量在无法通过传感器直接测量时,观测器可以替代传感器,获得控制时所需的物理量,举个最简单的例子,通常在电机上安装的位置传感器只是测量转子的位置,而转子的速度则是通过位置量的差分得到,这其实也是一个速度观测器,只不过是开环的观测器。再举一个高大上的例子,冷战时,美国水下监听系统,可以通过监听海底声音,提取潜水艇发送机的声音,定位几百英里外的苏联潜艇位置,这是一个了不起的位置观测器。 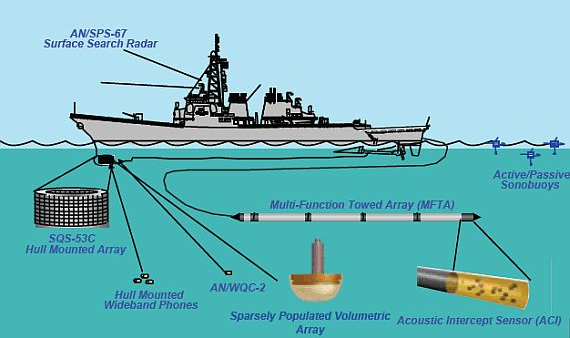
在无感FOC,正是通过观测含有转子位置信息的电机反电动势,设计转子位置和速度观测器,观测器可以直接采用控制器的所有研究成果,控制器上的稳定性、带宽等概念可以直接移植到观测器中。目前应用于基于反电动势的位置观测器理论包括线性龙贝格观测器、卡尔曼观测器和非线性滑模观测器等,目前在中高速领域应用最广的是非线性滑模观测器。
滑模控制算法是一种非线性控制系统,关键在于控制的不连续性,这种方法的实现要点是滑模面函数和滑模增益的选取,由于滑模控制算法的鲁棒性很强,因而对电机参数变化和外部干扰不敏感,用于观测转子位置时具有较高的可靠性。在基于反电动势的滑模观测器中,根据实际电流和观测器输出电流之间的误差,重构电机的反电动势,从而估算出转子位置和速度。 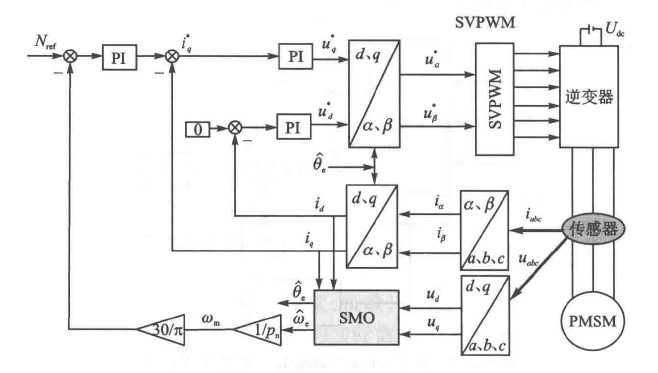
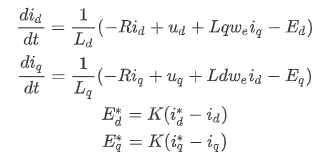
重写永磁同步电机的电压方程,代入反电动势,(d,q)坐标系下定子电流如下图: 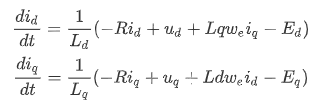
其中Ed,Eq是(d,q)坐标系下的感应电动势,为了得到感应电动势,设计如图5的滑模观测器,以观测电流和实际电流的差值,重构电机的反电动势Ed,Eq,代入(d,q)坐标系下电流的状态方程,得到观测电流值,依此循环迭代,ud,uq使用上一采样周期的电压指令值。 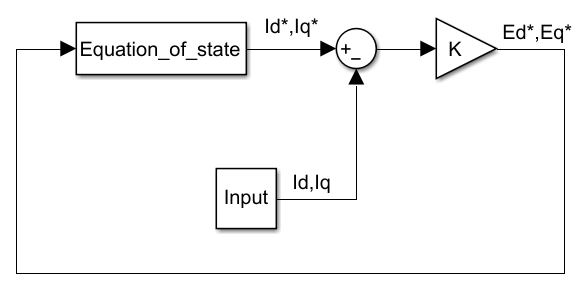
用观测值减去实际值,可得图6所示,当估计(d,q)坐标系下观测电流值收敛于实际电流值时,观测得到的感应电动势则收敛于实际电机的感应电动势。 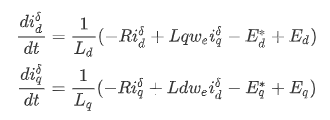
滑模观测器中的滑模增益如果取的小了,系统无法进入滑动状态,导致观测器可能不收敛,如果取的太大,会引起观测值在滑模面上不断抖振,引入较大干扰,需要在调试过程中摸索。
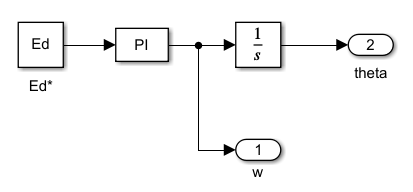
通过滑模观测器,得到了估计轴上的感应电动势。如果将实际轴(d,q)通过坐标变换到估计轴上后,其过程和park变换类似,如图7所示。下面通过PLL使E\_d*收敛到零,就可以将估计轴和实际轴的误差收敛到零,可得到转子实际位置和速度,PLL实际是一个线性PI观测器。 

下面按PI控制器的参数整定法整定PLL观测器的Kp和Ki,按二阶系统最优阻尼(0.707)整定,如图9所示,同时PLL观测器的带宽和反电动势幅值有关,反电动势较小时,应增大PLL观测器的带宽,加快转子位置和速度的收敛,但是PLL观测器的带宽越大,速度和位置观测值的噪声也越大。

4.总结
基于反电动势的滑模观测器对电机数学模型精确度要求不高,当电机的电阻R,电感L因温度而偏离模型预设值时,滑模观测器仍能保证转子位置和速度的精确观测,得到转子位置后,就可以采用上一章的控制方法控制电机。电机处于中高速运行时,滑模观测器是市面上最有效也是最常用的转子位置观测器,但是当电机处于低速或零速时,由于反电动势信号的微弱,转子位置观测值误差迅速增加,因而电机带载能力大大减弱,需要借助于其他方式来得到电机的转子位置。
参考文献:
[1]. 永磁同步电机无位置传感器控制技术研究综述.
[2]. 现代永磁同步电机控制原理及MATLAB仿真.
[3]. https://zhuanlan.zhihu.com/p/416224632.
更多电机控制技术干货请关注电机控制技术专栏。扫描下方二维码加入电机控制技术交流群与作者交流,如二维码失效请添加极术小姐姐微信(id:aijishu20),备注电机控制,加入微信群。


