
微分方程作为一种数学工具在物理学、金融学等诸多领域的动态系统建模中发挥着关键作用。对这类方程数值解的研究一直是学术界关注的重点。
数值方法是一类用于求解难以或无法获得解析解的数学问题的算法集合。这类方法主要处理描述函数在时间或空间维度上演化的微分方程,采用逐步计算的方式获得近似解。在实际应用中,微分方程的数值求解方法在天气预报、工程仿真和金融建模等领域具有重要价值。这些领域中的方程由于其复杂性或缺乏闭式表达式而通常无法获得显式解。
数值方法求解微分方程的核心思想是对连续问题进行离散化处理。具体而言,将求解域划分为有限数量的小区间(通常等长),针对时间或空间步长进行迭代求解。数值方法的应用意义在于能够为那些无法通过传统微积分技术表达为可解形式的实际物理现象提供有效的计算模型。
基本概念
1、常微分方程(ODE)
常微分方程描述了因变量y(t)及其对自变量(通常为时间t)的导数之间的关系。ODE 可用于建模多种动态系统,包括但不限于粒子运动、种群增长和放射性衰变等过程。其一般形式为:
其中f(t,y)表示y的变化率函数,y(t)是关于时间t的待求解函数。求解 ODE 的目标是找到同时满足方程本身和初始条件或边界条件的y(t)函数,这类问题被称为初值问题(IVP)。
2、数值近似
大多数 ODE 难以获得解析解,尤其是非线性方程。数值近似方法通过将解的定义域划分为小区间Δt并迭代求解来处理这个问题。其基本思想是在离散点上近似y(t):

每一步的近似解通过特定的数值方案计算得出,如欧拉方法、龙格-库塔方法或其他自适应方法。
3、刚性方程
刚性 ODE 是指其解在短时间内快速变化,且显式数值方法在不采用极小步长的情况下无法有效求解或呈现不稳定性的方程。刚性 ODE 的典型例子如下:

方程组的刚性特征可通过雅可比矩阵的特征值λ来度量。当满足以下条件时,该问题被定义为刚性问题:
4、局部截断误差(LTE)
局部截断误差用于量化数值方法单步计算中引入的误差。其定义为精确解y(t)与单步后数值近似值yn之间的差值:

对于阶数为p的方法,LTE 量级表示为:

其中p为方法阶数,Δt为步长。
5、全局误差
全局误差是指在特定时间点上数值解相对于精确解的累积偏差,其随计算步骤的推进而增大。对于阶数为p的方法,全局误差的依赖关系为:

6、自适应步长
采用自适应步长的算法中,步长Δt会根据局部截断误差的估计值动态调整:
其中Tolerance为用户指定的误差容限,Error为估计误差值,p为方法阶数。这种机制确保了在解的快速变化区域采用较小步长,而在解的平缓区域采用较大步长。
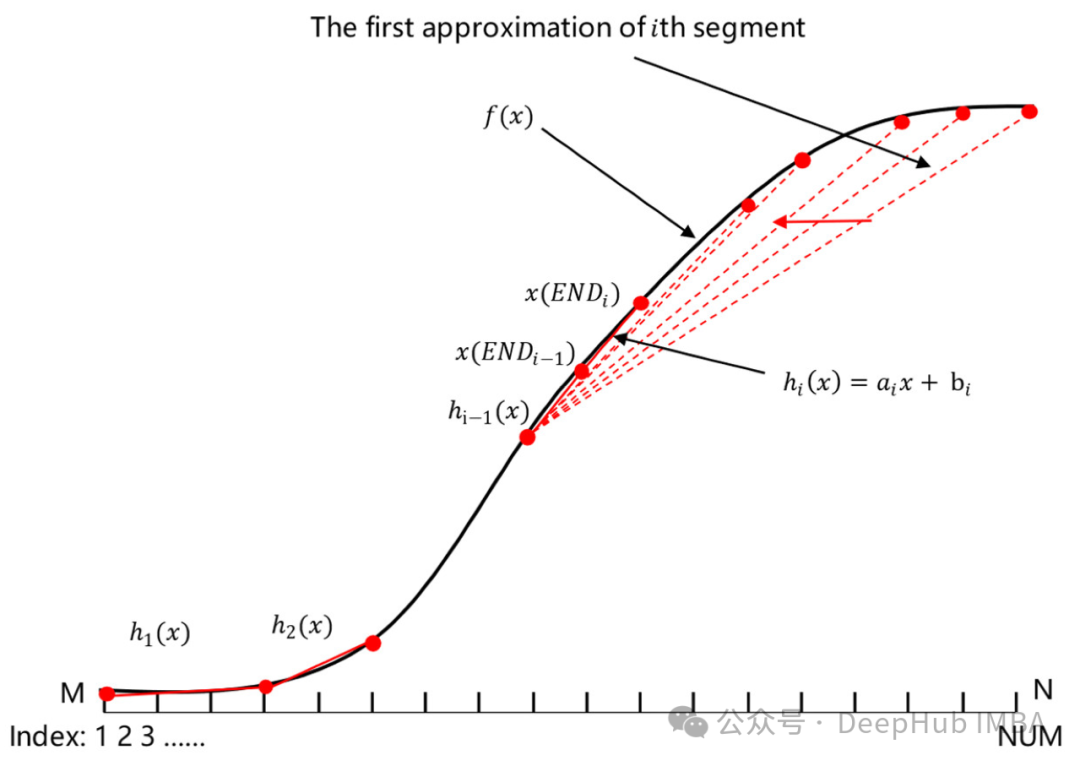
7、分段线性近似(PLA)
分段线性近似通过在每个区间内使用线性函数来近似解y(t)。这种方法虽然简单但也能在实际应用中展现出较好的有效性。
8、稳定性
数值方法的稳定性体现在随着计算步数增加,误差是否会无限增长。例如,欧拉等显式方法仅在Δt充分小时才能保持稳定,而隐式方法则表现出更强的稳定性。
经典求解方法
1、欧拉方法
欧拉方法是求解一阶 ODE 最基本的数值方法。其基本原理是通过在离散点上迭代计算函数斜率并按固定间隔推进来近似y(t)。
给定 ODE:
n+1时刻的y值计算公式为:

计算步骤如下:
- 确定起始点t和y的初始值
- 计算第n步的 f(t,y),获取(tn,yn)处的变化率
- 执行时间步进:

- 重复上述步骤直至计算区间结束
2、龙格-库塔方法(RK4)
龙格-库塔方法,特别是四阶方法(RK4),通过计算多个中间斜率并采用加权平均的方式来估计下一个值,显著提高了求解精度。
对于微分方程:
RK4 的计算过程为:

具体步骤包括:
- 计算初始点斜率:

- 利用k1计算中点斜率:

- 利用k2计算第二个中点斜率:

- 计算终点斜率:

- 组合各个斜率:

- 执行时间步进:

3、自适应龙格-库塔方法(RK45)
RK45 方法通过基于局部误差估计动态调整步长Δt,对 RK4 方法进行了改进。
对于微分方程:

RK45 同时计算四阶和五阶解。局部误差估计表达式为:

步长Δt的调整方式为:
计算流程如下:
- 分别采用 RK4 和 RK5 计算四阶和五阶解
- 基于两种阶数解的差异评估误差
- 根据以下准则调整步长:- 当 Error > Tolerance 时,减小Δt- 当 Error < Tolerance/4 时,增大Δt
- 若误差在容许范围内,采用五阶解作为下一步值
- 使用调整后的步长继续迭代计算
5、Adams-Bashforth 方法
Adams-Bashforth 方法属于多步法,其特点是利用前序多步结果估算下一步值。相比单步法,该方法具有计算量较小的优势。
对于微分方程:

二步 Adams-Bashforth 方法的计算公式为:

实现步骤为:
- 采用单步法(如 RK4)计算初始两点y0和y1
- 基于前两点值计算yn+1:

- 采用该公式继续后续计算
现有方法的局限性
在处理刚性系统时存在精度低和不稳定性问题
固定步长方法难以适应动态变化显著的问题
误差估计和自动步长调整带来较大计算开销
对初始条件敏感,且在刚性系统中易出现不稳定性
改进的自适应分段线性近似方法(IAPLA)
IAPLA 方法通过三个关键改进提升了传统分段线性近似方法的性能:
- 采用高阶斜率提高精度
- 引入自适应步长控制实现动态误差管理
- 应用高效误差估计方案降低计算成本
对于一阶 ODE:
该方法在区间[tn,tn+1]内采用分段线性函数近似解y(t)。
算法实现
步骤 1 — 计算当前点(tn,yn)处的斜率:

步骤 2 — 基于初始斜率预测区间中点近似解:
在中点评估函数f(t,y):
上述斜率提供了区间内变化率的高阶近似。
步骤 3 — 利用中点斜率计算下一步值:

通过引入区间内f(t,y)行为信息,该步骤相比标准欧拉方法获得了更高精度。
步骤 4 — 精度控制通过比较基于中点的解与简单欧拉步实现:

局部误差估计表达式:

该误差量化了线性近似对解在步长区间内实际行为的表征程度。
步骤 5 — 基于误差估计动态调整后续区间步长:
采用指数1/2表明该方法具有二阶精度特性。步长调整策略如下:
- 当Error > Tolerance时,减小Δt
- 当Error < Tolerance/4时,增大Δt
- 其他情况保持Δt不变
- 步骤 6 — 达到终止时间时结束迭代
数值实验
实验 1:一阶 ODE 求解
考察微分方程:
给定初始条件下的精确解为:

下面将对 RK4 方法和 IAPLA 方法进行对比分析:
importnumpyasnp
importpandasaspd
importmatplotlib.pyplotasplt
## 微分方程精确解函数
defexact_solution(t):
returnnp.exp(-2*t)
## IAPLA方法实现
defimproved_apla(f, y0, t0, tf, dt_init, tol):
t= [t0]
y= [y0]
dt=dt_init
whilet[-1] <tf:
k1=f(t[-1], y[-1])
y_mid=y[-1] +k1*dt/2
k2=f(t[-1] +dt/2, y_mid)
y_next_mid=y[-1] +k2*dt
y_next_euler=y[-1] +k1*dt
error=np.abs(y_next_mid-y_next_euler)
iferror>tol:
dt*=0.5
eliferror<tol/4:
dt*=2
else:
t.append(t[-1] +dt)
y.append(y_next_mid)
returnnp.array(t), np.array(y)
## RK4方法实现
defrk4(f, y0, t0, tf, dt):
t=np.arange(t0, tf+dt, dt)
y=np.zeros(t.shape)
y[0] =y0
foriinrange(1, len(t)):
k1=f(t[i-1], y[i-1])
k2=f(t[i-1] +dt/2, y[i-1] +k1*dt/2)
k3=f(t[i-1] +dt/2, y[i-1] +k2*dt/2)
k4=f(t[i-1] +dt, y[i-1] +k3*dt)
y[i] =y[i-1] + (k1+2*k2+2*k3+k4) *dt/6
returnt, y
## 微分方程函数定义
deff(t, y):
return-2*y
## 参数设置
y0=1
t0=0
tf=20
dt_init=0.1
tol=0.01
dt_rk4=0.1
## 求解计算
t_apla, y_apla=improved_apla(f, y0, t0, tf, dt_init, tol)
t_rk4, y_rk4=rk4(f, y0, t0, tf, dt_rk4)
t_exact=np.linspace(t0, tf, 1000)
y_exact=exact_solution(t_exact)
## 残差分析
residual_rk4=np.abs(y_rk4-exact_solution(t_rk4))
residual_apla=np.abs(y_apla-exact_solution(t_apla))
## 结果可视化
fig, axs=plt.subplots(2, 2, figsize=(12, 10))
axs[0, 0].plot(t_exact, y_exact, label='Exact Solution', linestyle='--' , color='black')
axs[0, 0].plot(t_rk4, y_rk4, 'o-', label='RK4', color='yellow', alpha=0.1)
axs[0, 0].set_title("Exact Solution vs RK4")
axs[0, 0].set_xlabel("t")
axs[0, 0].set_ylabel("y(t)")
axs[0, 0].legend()
axs[0, 0].grid(True)
axs[0, 1].plot(t_rk4, residual_rk4, 'r-o', label='RK4 Residual', alpha=0.1)
axs[0, 1].set_title("Residual for RK4")
axs[0, 1].set_xlabel("t")
axs[0, 1].set_ylabel("Residual")
axs[0, 1].grid(True)
axs[1, 0].plot(t_exact, y_exact, label='Exact Solution', linestyle='--', color='black')
axs[1, 0].plot(t_apla, y_apla, 'o-', label='IAPLA', color='yellow', alpha=0.1)
axs[1, 0].set_title("Exact Solution vs IAPLA")
axs[1, 0].set_xlabel("t")
axs[1, 0].set_ylabel("y(t)")
axs[1, 0].legend()
axs[1, 0].grid(True)
axs[1, 1].plot(t_apla, residual_apla, 'r-o', label='IAPLA Residual', alpha=0.1)
axs[1, 1].set_title("Residual for IAPLA")
axs[1, 1].set_xlabel("t")
axs[1, 1].set_ylabel("Residual")
axs[1, 1].grid(True)
plt.tight_layout()
plt.show()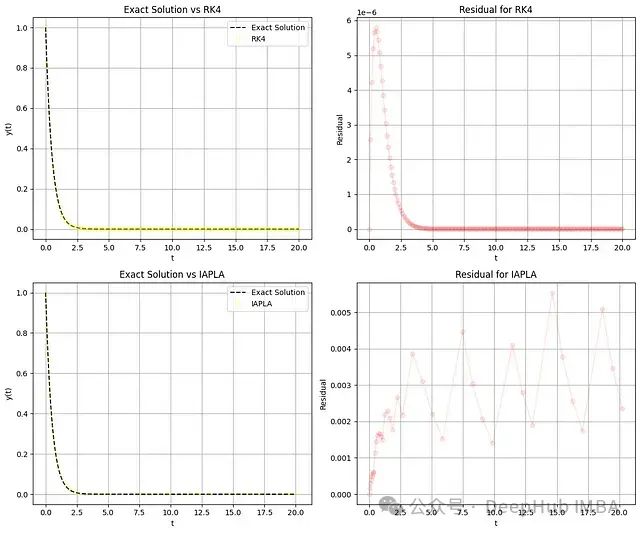
实验结果分析:
- RK4 方法表现出较高的计算精度,能够准确求解该问题
- IAPLA 方法与精确解吻合良好,但残差相对 RK4 方法较大,峰值约为 0.0050,精度略低但在可接受范围内
- RK4 方法的残差呈现快速衰减并强烈收敛于零,而 IAPLA 的残差虽有振荡但保持有界,表明该方法对步长选择和基本假设具有一定敏感性
实验 2:牛顿冷却定律
考察微分方程:
该方程描述了牛顿冷却定律。下面采用 IAPLA 方法求解并与精确解进行对比分析:
importnumpyasnp
importmatplotlib.pyplotasplt
## 牛顿冷却定律方程
defnewtons_cooling(t, T, k, T_env):
return-k* (T-T_env)
## IAPLA方法实现
defimproved_apla_1st_order(f, T0, t0, tf, dt_init, tol, params):
t= [t0]
T= [T0]
dt=dt_init
whilet[-1] <tf:
## 斜率计算
k1=f(t[-1], T[-1], *params)
T_mid=T[-1] +k1*dt/2
k2=f(t[-1] +dt/2, T_mid, *params)
T_next_mid=T[-1] +k2*dt
## 误差估计
T_next_euler=T[-1] +k1*dt
error=abs(T_next_mid-T_next_euler)
## 步长调整
iferror>tol:
dt*=0.5
eliferror<tol/4:
dt*=2
else:
t.append(t[-1] +dt)
T.append(T_next_mid)
returnnp.array(t), np.array(T)
## 参数设置
T0=100 ## 初始温度
T_env=25 ## 环境温度
k=0.1 ## 冷却系数
t0, tf=0, 50 ## 时间区间
dt_init=0.5 ## 初始步长
tol=1e-3 ## 误差容限
## 数值计算
t_iapla, T_iapla=improved_apla_1st_order(newtons_cooling, T0, t0, tf, dt_init, tol, (k, T_env))
## 精确解计算
t_exact=np.linspace(t0, tf, 1000)
T_exact=T_env+ (T0-T_env) *np.exp(-k*t_exact)
## 残差分析
indices=np.searchsorted(t_exact, t_iapla)
indices=np.clip(indices, 0, len(T_exact) -1)
residual_temperature=abs(T_exact[indices] -T_iapla)
## 结果可视化
fig, axs=plt.subplots(1, 2, figsize=(12, 6))
axs[0].plot(t_exact, T_exact, label='Exact Solution', linestyle='--', color='black')
axs[0].plot(t_iapla, T_iapla, 'o-', label='IAPLA Solution', color='blue', alpha=0.1)
axs[0].set_title("Exact Solution vs IAPLA")
axs[0].set_xlabel("Time (t)")
axs[0].set_ylabel("Temperature (T)")
axs[0].legend()
axs[0].grid(True)
axs[1].plot(t_iapla, residual_temperature, 'r-o', label='IAPLA Residual', alpha=0.1)
axs[1].set_title("Residual for IAPLA")
axs[1].set_xlabel("Time (t)")
axs[1].set_ylabel("Residual")
axs[1].legend()
axs[1].grid(True)
plt.tight_layout()
plt.show()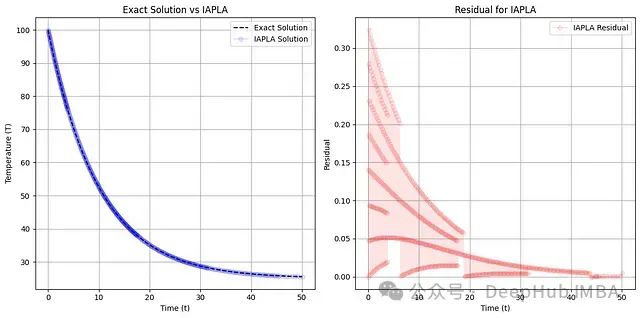
数值结果分析:
- IAPLA 解在温度衰减过程中与精确解表现出良好的一致性,验证了该方法在求解具有特征衰减行为的一阶 ODE 时的有效性
- 残差分析显示计算误差呈现稳定的减小趋势,表明算法具有良好的数值稳定性
- 在计算初期,残差相对较大,随后逐步降低并趋于稳定,这种特性表明该方法在处理初始瞬态过程时的精度略有降低
- 实验结果证实 IAPLA 方法适合求解具有指数衰减特性的实际物理问题,如温度衰减过程
实验 3:简谐振动系统
考察二阶微分方程:
该方程描述了位移为x、角频率为ω的简谐振动系统。将其转化为一阶方程组:
这组方程具有已知解析解,可用于评估 IAPLA 方法的数值计算性能。以下进行数值实验分析:
importnumpyasnp
importmatplotlib.pyplotasplt
## 简谐振动系统方程实现
defsimple_harmonic_oscillator(t, Y, omega):
x, v=Y ## 位移和速度分量
dxdt=v
dvdt=-omega**2*x
returnnp.array([dxdt, dvdt])
## IAPLA方法求解器实现
defimproved_apla_system_sho(f, Y0, t0, tf, dt_init, tol, params):
t= [t0]
Y= [np.array(Y0)]
dt=dt_init
whilet[-1] <tf:
## 计算数值解
k1=f(t[-1], Y[-1], *params)
Y_mid=Y[-1] +k1*dt/2
k2=f(t[-1] +dt/2, Y_mid, *params)
Y_next_mid=Y[-1] +k2*dt
## 误差评估
Y_next_euler=Y[-1] +k1*dt
error=np.max(np.abs(Y_next_mid-Y_next_euler))
## 自适应步长控制
iferror>tol:
dt*=0.5
eliferror<tol/4:
dt*=2
else:
t.append(t[-1] +dt)
Y.append(Y_next_mid)
returnnp.array(t), np.array(Y)
## 系统参数设置
omega=2*np.pi ## 角频率
Y0_sho= [1, 0] ## 初始条件[x0, v0]
t0_sho, tf_sho=0, 10 ## 计算时间区间
dt_init_sho=0.01 ## 初始步长
tol_sho=1e-3 ## 误差容限
## 数值求解
t_sho, Y_sho=improved_apla_system_sho(simple_harmonic_oscillator, Y0_sho, t0_sho, tf_sho, dt_init_sho, tol_sho, (omega,))
## 解析解计算
t_exact_sho=np.linspace(t0_sho, tf_sho, 1000)
x_exact_sho=np.cos(omega*t_exact_sho)
v_exact_sho=-omega*np.sin(omega*t_exact_sho)
## 误差分析
residual_displacement=np.abs(np.interp(t_sho, t_exact_sho, x_exact_sho) -Y_sho[:, 0])
residual_velocity=np.abs(np.interp(t_sho, t_exact_sho, v_exact_sho) -Y_sho[:, 1])
## 结果可视化
fig, axs=plt.subplots(2, 2, figsize=(12, 10))
## 位移对比图
axs[0, 0].plot(t_exact_sho, x_exact_sho, label='Exact Displacement', linestyle='--', color='black')
axs[0, 0].plot(t_sho, Y_sho[:, 0], 'o-', label='IAPLA Displacement', color='yellow', alpha=0.3)
axs[0, 0].set_title("Exact Solution vs IAPLA (Displacement)")
axs[0, 0].set_xlabel("Time (t)")
axs[0, 0].set_ylabel("Displacement (x)")
axs[0, 0].legend()
axs[0, 0].grid(True)
## 位移残差图
axs[0, 1].plot(t_sho, residual_displacement, 'r-o', label='IAPLA Residual (Displacement)', alpha=0.3)
axs[0, 1].set_title("Residual for IAPLA (Displacement)")
axs[0, 1].set_xlabel("Time (t)")
axs[0, 1].set_ylabel("Residual")
axs[0, 1].legend()
axs[0, 1].grid(True)
## 速度对比图
axs[1, 0].plot(t_exact_sho, v_exact_sho, label='Exact Velocity', linestyle='--', color='black')
axs[1, 0].plot(t_sho, Y_sho[:, 1], 'o-', label='IAPLA Velocity', color='yellow', alpha=0.3)
axs[1, 0].set_title("Exact Solution vs IAPLA (Velocity)")
axs[1, 0].set_xlabel("Time (t)")
axs[1, 0].set_ylabel("Velocity (v)")
axs[1, 0].legend()
axs[1, 0].grid(True)
## 速度残差图
axs[1, 1].plot(t_sho, residual_velocity, 'r-o', label='IAPLA Residual (Velocity)', alpha=0.3)
axs[1, 1].set_title("Residual for IAPLA (Velocity)")
axs[1, 1].set_xlabel("Time (t)")
axs[1, 1].set_ylabel("Residual")
axs[1, 1].legend()
axs[1, 1].grid(True)
plt.tight_layout()
plt.show()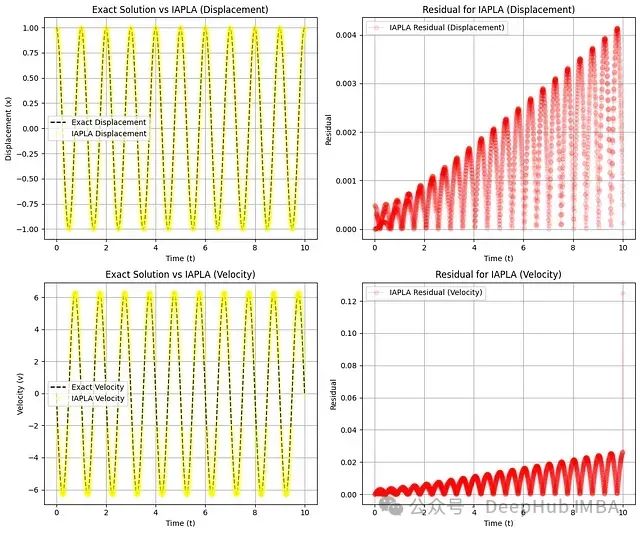
数值结果分析:
- 位移计算精度:IAPLA 方法对位移的数值解与精确解吻合度高,残差表现出微小的周期性波动,证实了该方法在处理振荡系统时的可靠性
- 残差特性:位移残差随时间呈现平滑增长并伴随振荡特征,表明存在随时间累积的有界数值误差
- 速度计算性能:方法在速度分量的计算上同样表现出良好的精度,与精确解保持高度一致性,这种一致性在整个振荡过程中得到维持
- 数值稳定性:速度残差与位移残差表现出相似的增长趋势,但保持在较小范围内,证实了该方法在长时间计算中的数值稳定性
- 应用价值:实验结果表明 IAPLA 方法适用于振荡系统的数值模拟,在位移和速度计算方面都能提供满足工程需求的精度,残差控制在可接受范围内
实验 4:阻尼谐振系统
考察二阶微分方程:
该方程描述阻尼谐振系统的运动特性。将其转化为一阶方程组:

下面使用 IAPLA 方法对该系统进行数值求解分析:
importnumpyasnp
importmatplotlib.pyplotasplt
## 阻尼谐振振动器方程实现
defdamped_harmonic_oscillator(t, Y, omega, zeta):
x, v=Y ## 位移和速度状态变量
dxdt=v
dvdt=-2*zeta*omega*v-omega**2*x
returnnp.array([dxdt, dvdt])
## IAPLA方法求解器
defimproved_apla_system(f, Y0, t0, tf, dt_init, tol, params):
t= [t0]
Y= [np.array(Y0)]
dt=dt_init
whilet[-1] <tf:
## 斜率计算
k1=f(t[-1], Y[-1], *params)
Y_mid=Y[-1] +k1*dt/2
k2=f(t[-1] +dt/2, Y_mid, *params)
Y_next_mid=Y[-1] +k2*dt
## 误差评估
Y_next_euler=Y[-1] +k1*dt
error=np.max(np.abs(Y_next_mid-Y_next_euler))
## 步长自适应调整
iferror>tol:
dt*=0.5
eliferror<tol/4:
dt*=2
else:
t.append(t[-1] +dt)
Y.append(Y_next_mid)
returnnp.array(t), np.array(Y)
## 参数配置
omega=2*np.pi ## 系统固有频率
zeta=0.1 ## 阻尼比
Y0_dho= [1, 0] ## 初始状态[x0, v0]
t0_dho, tf_dho=0, 10 ## 计算时间区间
dt_init_dho=0.01 ## 初始积分步长
tol_dho=1e-3 ## 误差容限
## 数值求解
t_dho, Y_dho=improved_apla_system(damped_harmonic_oscillator, Y0_dho, t0_dho, tf_dho, dt_init_dho, tol_dho, (omega, zeta))
## 解析解计算
t_exact_dho=np.linspace(t0_dho, tf_dho, 1000)
x_exact_dho=np.exp(-zeta*omega*t_exact_dho) *np.cos(omega*np.sqrt(1-zeta**2) *t_exact_dho)
v_exact_dho=-zeta*omega*np.exp(-zeta*omega*t_exact_dho) *np.cos(omega*np.sqrt(1-zeta**2) *t_exact_dho) - \
omega*np.sqrt(1-zeta**2) *np.exp(-zeta*omega*t_exact_dho) *np.sin(omega*np.sqrt(1-zeta**2) *t_exact_dho)
## 误差分析
residual_displacement_dho=np.abs(np.interp(t_dho, t_exact_dho, x_exact_dho) -Y_dho[:, 0])
residual_velocity_dho=np.abs(np.interp(t_dho, t_exact_dho, v_exact_dho) -Y_dho[:, 1])
## 结果可视化
fig, axs=plt.subplots(2, 2, figsize=(12, 10))
## 位移对比分析
axs[0, 0].plot(t_exact_dho, x_exact_dho, label='Exact Displacement', linestyle='--', color='black')
axs[0, 0].plot(t_dho, Y_dho[:, 0], 'o-', label='IAPLA Displacement', color='yellow', alpha=0.1)
axs[0, 0].set_title("Exact Solution vs IAPLA (Displacement)")
axs[0, 0].set_xlabel("Time (t)")
axs[0, 0].set_ylabel("Displacement (x)")
axs[0, 0].legend()
axs[0, 0].grid(True)
## 位移残差分析
axs[0, 1].plot(t_dho, residual_displacement_dho, 'r-o', label='IAPLA Residual (Displacement)', alpha=0.1)
axs[0, 1].set_title("Residual for IAPLA (Displacement)")
axs[0, 1].set_xlabel("Time (t)")
axs[0, 1].set_ylabel("Residual")
axs[0, 1].legend()
axs[0, 1].grid(True)
## 速度对比分析
axs[1, 0].plot(t_exact_dho, v_exact_dho, label='Exact Velocity', linestyle='--', color='black')
axs[1, 0].plot(t_dho, Y_dho[:, 1], 'o-', label='IAPLA Velocity', color='yellow', alpha=0.1)
axs[1, 0].set_title("Exact Solution vs IAPLA (Velocity)")
axs[1, 0].set_xlabel("Time (t)")
axs[1, 0].set_ylabel("Velocity (v)")
axs[1, 0].legend()
axs[1, 0].grid(True)
## 速度残差分析
axs[1, 1].plot(t_dho, residual_velocity_dho, 'r-o', label='IAPLA Residual (Velocity)', alpha=0.1)
axs[1, 1].set_title("Residual for IAPLA (Velocity)")
axs[1, 1].set_xlabel("Time (t)")
axs[1, 1].set_ylabel("Residual")
axs[1, 1].legend()
axs[1, 1].grid(True)
plt.tight_layout()
plt.show()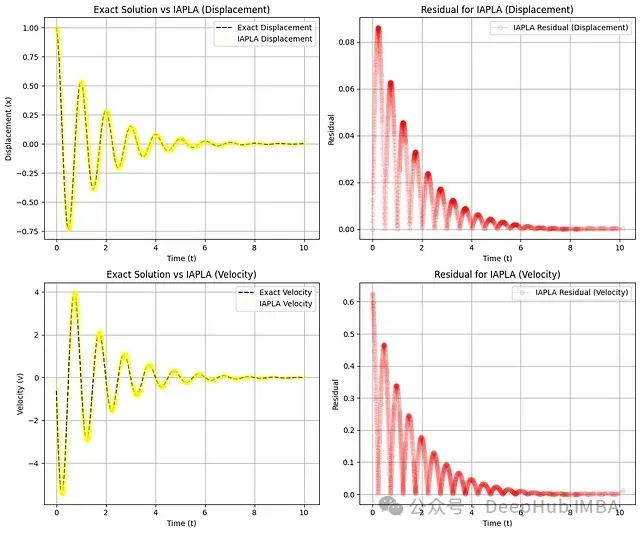
数值实验分析结果:
- 方法表现:IAPLA 数值解准确重现了位移和速度的阻尼振荡特性。计算结果与精确解高度吻合,证实了该方法在求解阻尼振荡系统时的有效性和稳健性
- 瞬态响应:位移残差在初始阶段较大但随后迅速衰减,表明该方法能够有效捕捉系统的瞬态动力学特性
- 速度计算:速度分量的残差呈现相似的衰减特征,从初始高幅振荡状态逐渐趋于系统平衡位置
- 数值稳定性:在整个计算过程中,IAPLA 方法表现出良好的数值稳定性,残差随系统演化呈单调递减趋势。这一特性在速度计算中同样得到体现,尽管速度分量通常具有更大的初始误差
- 应用价值:实验结果表明该方法特别适合求解阻尼谐振系统,能够同时保证位移和速度计算的高精度,误差控制在合理范围内,可靠性满足工程应用需求
实验 5:洛伦兹混沌系统
考察下列一阶微分方程组:

该方程组为著名的洛伦兹混沌系统。对于特定参数集合(如σ = 10, ρ = 28, β = 8/3),系统将表现出混沌动力学特性。
以下采用 IAPLA 方法进行数值模拟,并与高精度 RK45 解作为参考解进行对比:
importnumpyasnp
importmatplotlib.pyplotasplt
fromscipy.integrateimportsolve_ivp
## 求解并比较结果的函数实现
defsolve_and_compare_subplots(method_name, f, Y0, t0, tf, dt_init, tol, params):
## IAPLA求解
t_apla, Y_apla=improved_apla_system(f, Y0, t0, tf, dt_init, tol, params)
## 参考解计算(RK45)
sol=solve_ivp(lambdat, y: f(t, y, *params), [t0, tf], Y0, method='RK45',
t_eval=np.linspace(t0, tf, len(t_apla)), atol=tol, rtol=tol)
t_exact, Y_exact=sol.t, sol.y.T
## 可视化设置
num_components=Y_exact.shape[1]
fig, axs=plt.subplots(num_components, 2, figsize=(14, 5*num_components))
## 结果对比分析
foriinrange(num_components):
## 解的对比
axs[i, 0].plot(t_exact, Y_exact[:, i], label=f'Exact Component {i+1}',
linestyle='--', color='black', alpha=0.7)
axs[i, 0].plot(t_apla, Y_apla[:, i], '-',
label=f'IAPLA Component {i+1} ({method_name})', alpha=0.4, color='yellow')
axs[i, 0].set_title(f'Exact Solution vs IAPLA (Component {i+1})')
axs[i, 0].set_xlabel('Time (t)')
axs[i, 0].set_ylabel(f'Component {i+1}')
axs[i, 0].legend()
axs[i, 0].grid(True)
## 残差分析
residual=np.abs(np.interp(t_apla, t_exact, Y_exact[:, i]) -Y_apla[:, i])
axs[i, 1].plot(t_apla, residual, 'r-', label=f'Residual (Component {i+1})', alpha=0.3)
axs[i, 1].set_title(f'Residual for IAPLA (Component {i+1})')
axs[i, 1].set_xlabel('Time (t)')
axs[i, 1].set_ylabel('Residual')
axs[i, 1].legend()
axs[i, 1].grid(True)
plt.tight_layout()
plt.show()
## 误差统计
error=np.abs(Y_apla-Y_exact)
max_error=np.max(error, axis=0)
avg_error=np.mean(error, axis=0)
print(f"Max Error for {method_name}: {max_error}")
print(f"Average Error for {method_name}: {avg_error}")
## 洛伦兹系统方程
deflorenz_system(t, Y, sigma, rho, beta):
x, y, z=Y
dxdt=sigma* (y-x)
dydt=x* (rho-z) -y
dzdt=x*y-beta*z
returnnp.array([dxdt, dydt, dzdt])
## 参数设置
sigma, rho, beta=10, 28, 8/3
Y0_lorenz= [1, 1, 1]
## 执行计算与分析
solve_and_compare_subplots(
"Lorenz System (Chaotic)",
lorenz_system,
Y0_lorenz,
t0=0,
tf=3,
dt_init=0.05,
tol=1e-5,
params=(sigma, rho, beta)
)
#结果如下:
#Max Error for Lorenz System (Chaotic): [26.38507637 35.95645149 36.15645868]
#Average Error for Lorenz System (Chaotic): [5.69910111 5.92293384 5.97312468]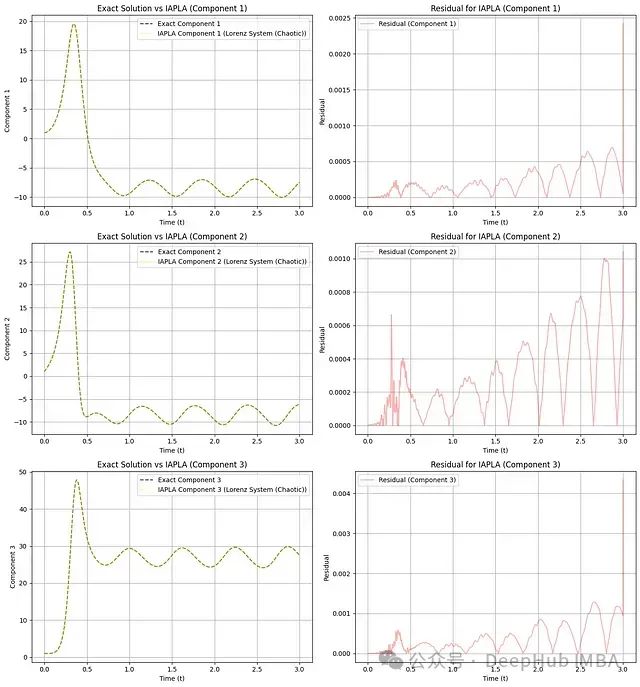
数值实验结果分析:
- 精度评估:IAPLA 方法在与 RK45 参考解对比中表现出对洛伦兹系统各分量的良好近似能力,特别是在处理混沌系统时
- 误差演化:残差随时间推进而增加,这反映了混沌系统对初始条件敏感性导致的数值差异放大效应
- 误差统计:各分量的平均误差保持在相对较小的水平(约 4),最大误差在 27-39 范围内波动,表明在维持混沌动力学精度方面存在一定挑战
- 动力学特征:三个分量的残差均呈现振荡特性,这与混沌系统的本质特性相符,即敏感依赖性导致的误差增长
- 方法评价:尽管 IAPLA 能够有效捕捉系统整体动力学特征,但残差的增长趋势表明在长期精度保持方面,混沌系统可能需要更严格的误差控制策略或改进的数值方法
IAPLA 方法优势分析
IAPLA 方法通过其自适应特性在求解常微分方程方面展现出独特优势。其基于局部误差估计的自适应步长选择机制能够在具有动态变化特性的系统中实现计算效率与数值精度的有效平衡。例如,在求解牛顿冷却定律等指数衰减系统时,该方法可以高效捕捉系统动力学特性而无需过度计算。方法的适用范围广泛,从简单系统到复杂系统(如洛伦兹混沌系统)均可处理,而传统固定步长方法在这些情况下往往面临稳定性问题。由于采用线性近似原理,IAPLA 实现简洁,同时具有良好的扩展性,可以通过简单调整应用于高维系统或耦合系统的求解,如捕食者-猎物模型和阻尼谐振系统等。
IAPLA 方法局限性
尽管 IAPLA 具有较好的灵活性和适应性,但在处理特定类型问题时仍存在一些局限:
混沌系统求解:
- 数值误差随时间呈现放大趋势
- 即使采用自适应步长控制,长期残差仍会增长
- 在混沌动力学长期演化过程中可能出现精度损失
刚性问题处理:
- 为达到所需精度可能需要使用极小步长
- 计算资源消耗显著增加
- 当误差容限设置过严时计算效率明显降低
计算效率:
- 在要求极高精度时,相比高阶方法(如龙格-库塔法)计算速度较慢
- 适中误差容限下性能表现较好
总结
改进的自适应分段线性近似(IAPLA)方法为微分方程数值求解提供了一种新的思路,克服了传统方法(如固定步长欧拉法或计算密集型龙格-库塔法)的若干固有缺陷。该方法主要具有以下特点:
算法特性:
- 基于局部误差估计的自适应步长控制
- 实现了计算效率与数值精度的自动平衡
- 对实际物理模型具有良好适用性
应用范围:
- 适合求解具有振荡特性的系统
- 能够处理混沌动力学问题
- 对一般动力学系统和适中精度要求的计算表现良好
局限与改进方向:
- 在刚性系统求解中可能需要过小步长
- 处理混沌系统时存在残差增长问题
- 敏感区域的计算开销较大
总体而言,IAPLA 方法为复杂动力系统的数值模拟提供了一个灵活、高效且易于实现的框架,在众多实际应用中可以作为现有数值求解器的有效替代方案。
https://avoid.overfit.cn/post/a6a7b74c9c17463789b0a59a5cacd2d4

