全卷积检测器放弃一对多匹配,采用一对一匹配策略实现端到端检测,但存在收敛速度慢的问题。在本文中重新审视了这两种匹配方法,发现将...

在之前的文章中,我们已经搭建过「以文搜图」、「以图搜图」等搜索服务,而今天这篇文章,将要教会你如何搭建一个「视频动作分类」的 AI...

🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取最新的动态。如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟如果对您有帮助,...
11 月 17 日,2022 骁龙峰会第二日,高通带来新款 AR 芯片平台骁龙 AR2。 一改以往 XR 平台系列的命名,直接将新平台唤作 AR。 在媒体连...

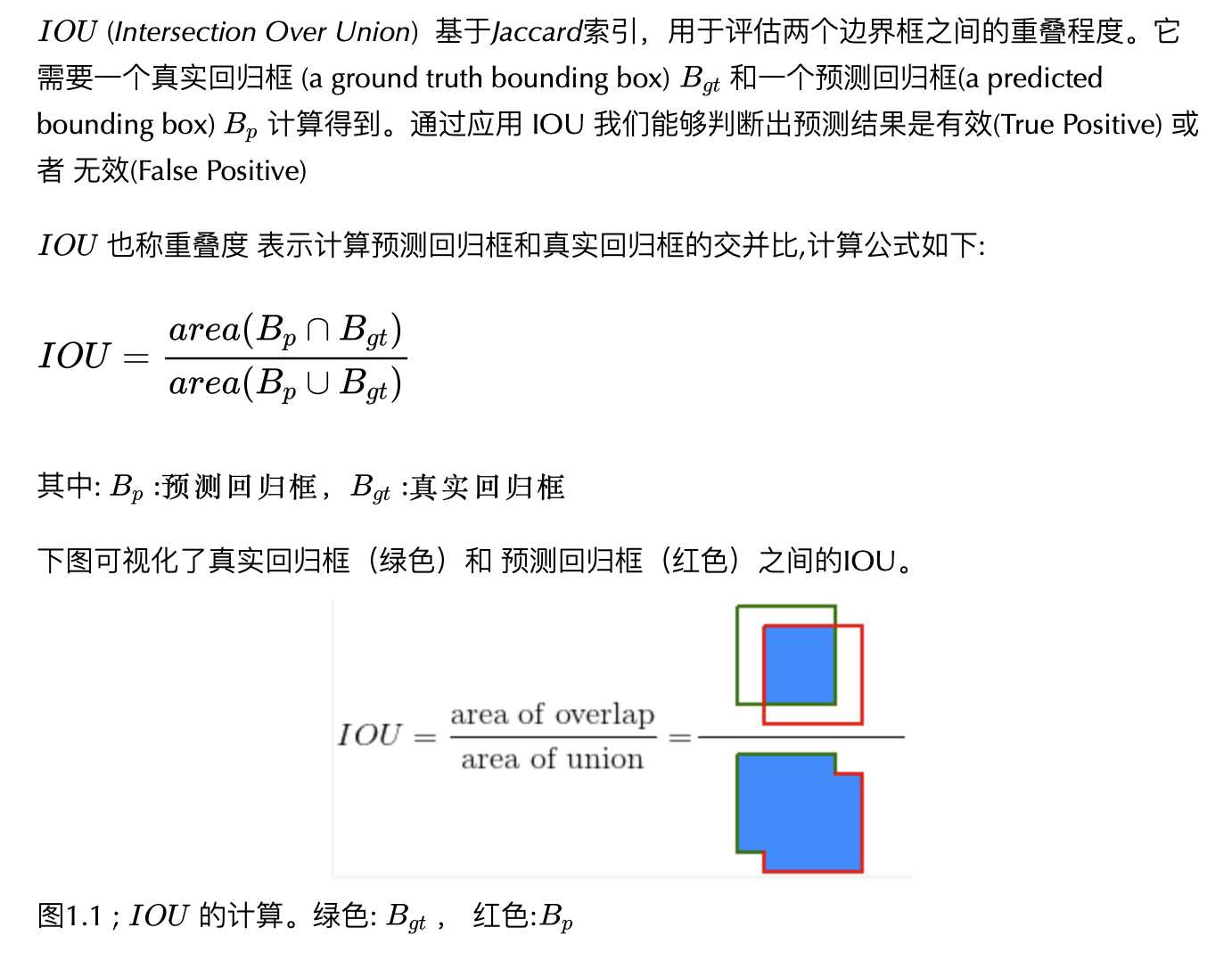
目标检测是计算机视觉中的一个重要课题,后处理是典型目标检测流水线的重要组成部分,这对传统目标检测模型的性能造成了严重的瓶颈。作...

直播主题 人脸识别算法最佳应用实践讲解 直播时间 11月17日 周四 20:00 直播平台 方式一:[链接] 点击链接预约进入直播间 方式二:在哔...

相比近年来大尺度ViT取得的巨大成功,基于CNN的大尺度模型仍处于早期阶段。本文提出了一种新的基于CNN的大尺度基础模型InternImage,它...

🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取最新的动态。如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟如果对您有帮助,...

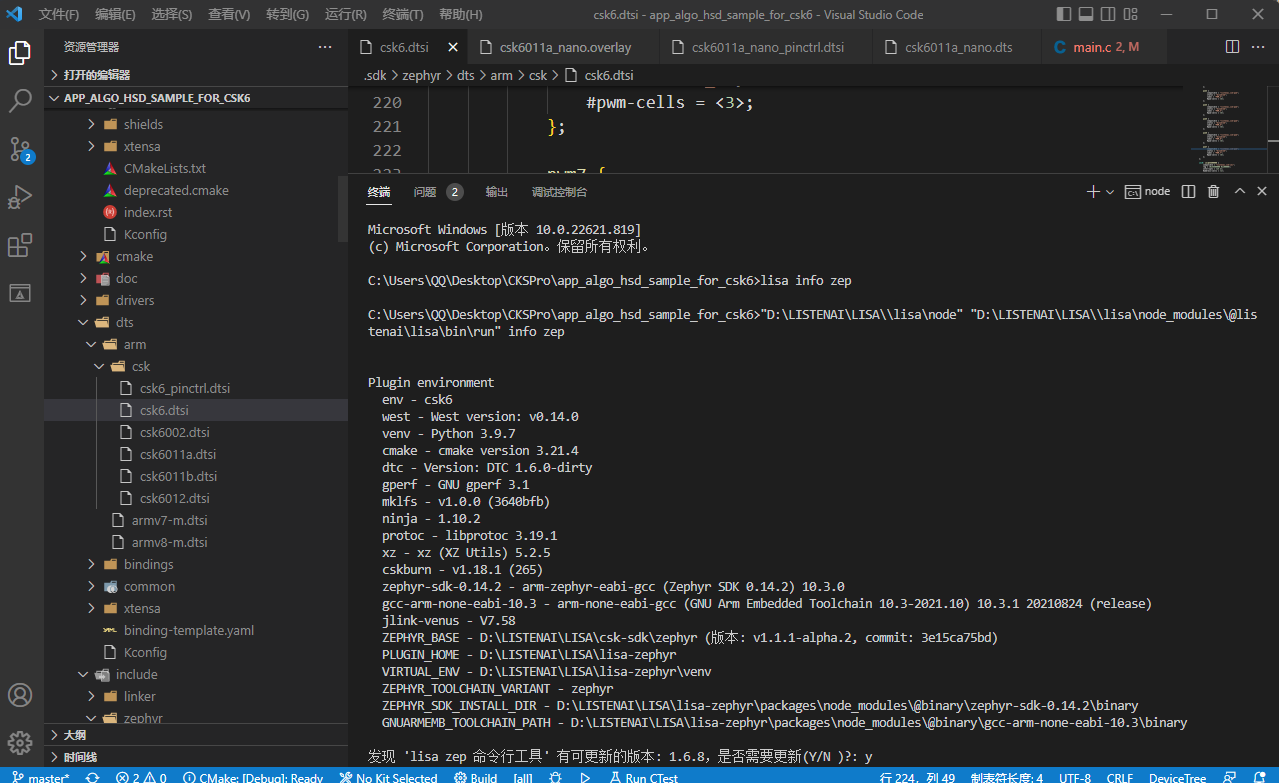
环境搭建官方文档详细环境搭建教程:环境搭建1、下载 Git 进行安装。2、安装 lisa zep 工具,并初始化 CSK6 SDK 所需的开发环境。3、检...
任意方向目标检测是遥感图像目标检测与自然场景文字检测中最基本的任务。本文提出了一种高效的Anchor-free 旋转目标检测方案PP-YOLOE-R...
🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取 最新的动态。 如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟 如果对您有帮...

在各种炫酷又功能强大的 XR 头戴设备(VR/AR/MR)大行其道的今天,不知还有多少人还会有那么一点点怀念多年前火遍淘宝的 VR 盒子?

今年 6 月集度品牌首次向公众亮相,当时选择在略显玄乎的「元宇宙」希壤中做了品牌发布,同时发布的还有汽车机器人概念车 ROBO-01。并计...

热度只增不减的元宇宙,让众多互联网公司为之不惜加码,投入大量的人力、物力和财力,从不同角度切入元宇宙这条新赛道。对此,我们很荣...

本教程涉及到的代码在 [链接] ,教程也同样适用于 ultralytics/yolov5 因为 one-yolov5 仅仅是换了一个运行时后端而已,计算逻辑和代码...
本文探讨了普通视觉Transformer(ViT)用于语义分割的能力,并提出了SegViT。以前基于ViT的分割网络通常从ViT的输出中学习像素级表示。...
多目标跟踪和分割任务是指在视频中定位和关联感兴趣的目标,是视频内容理解和人机交互等许多应用中的基础技术。现有的计算机视觉系统在...

英文词组「have legs」除了单词本身的意思之外,还有多层含义。有腿,延伸为走得快、站得住脚。但在 Meta 的语境,就是单纯的直译「有腿...

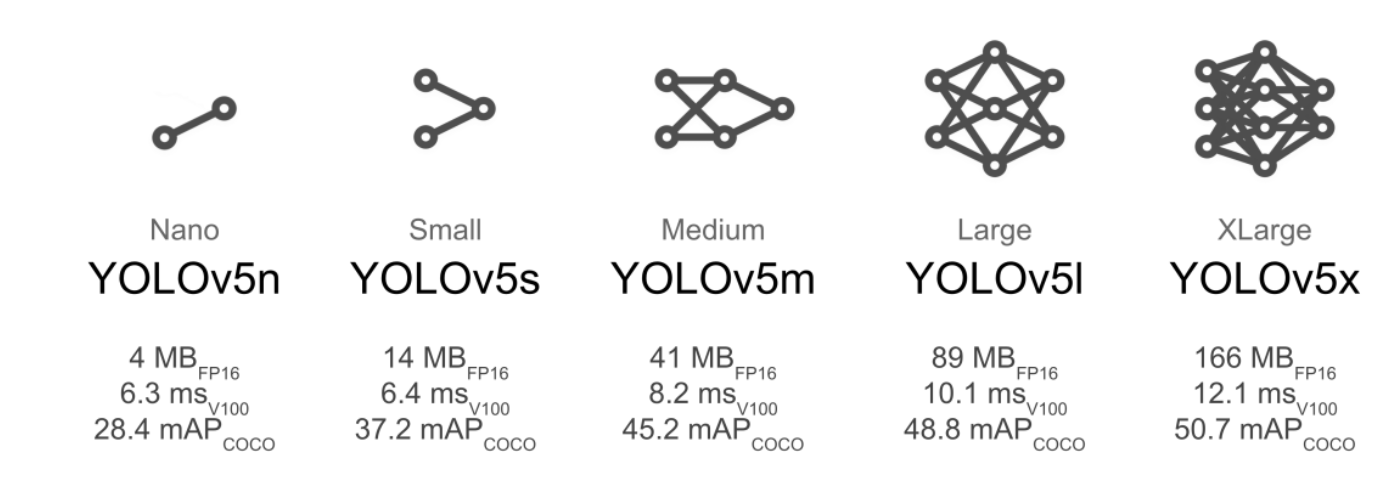
为了说明使用 OneFlow 训练目标检测模型的可行性以及性能的优越性,最近我们将 ultralytics 版 YOLOv5([链接])通过import oneflow as ...
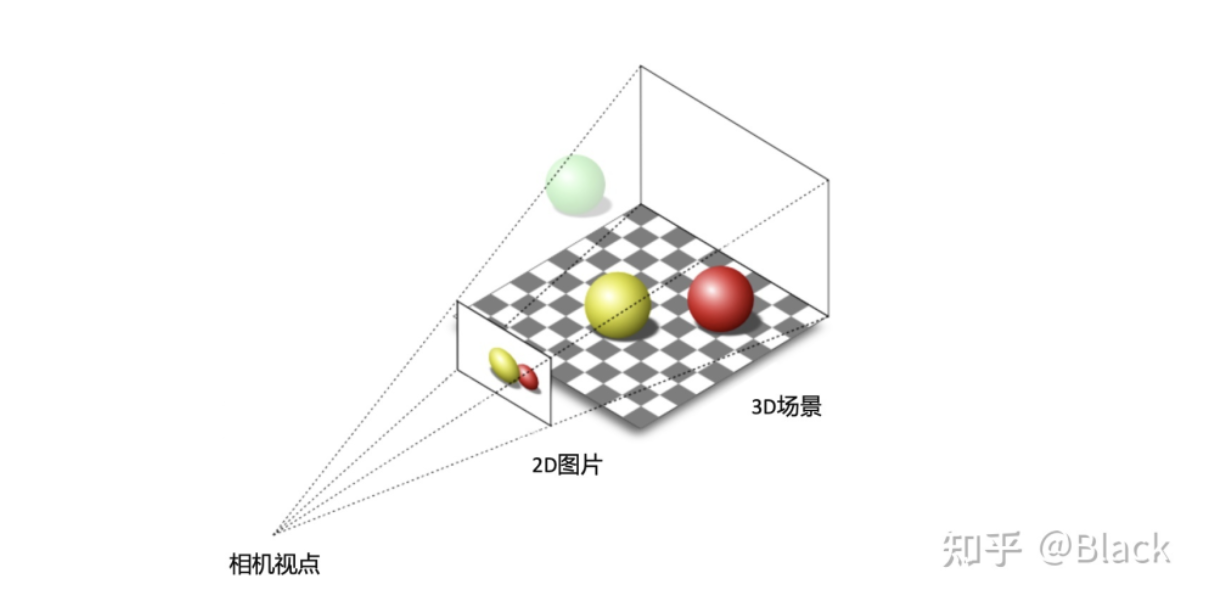
做为被动传感器的相机,其感光元件仅接收物体表面反射的环境光,3D场景经投影变换呈现在2D像平面上,成像过程深度信息丢失了。而当我们...