全志科技近日推出了一款针对带屏音箱的 AI 芯片 R818,芯片采用 28nm HPC+ 工艺制成,搭载四核 ARM CortexTM-A53。

在ImageNet数据集上,PeleeNet只有MobileNet模型的66%,并且比MobileNet精度更高。PeleeNet作为backbone实现SSD能够在VOC2007数据集上达...

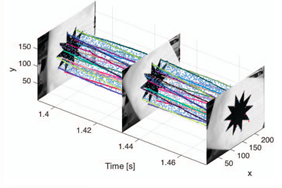
由于事件相机不能提供完整的图像,所以最初的特征跟踪依赖传统相机的数据。本推送介绍事件相机特征检测与跟踪的一篇较早的工作:Feature...
作者:AIRX首发:3D视觉工坊微信公众号1、Meshroom ⭐4,474Meshroom是一款基于AliceVision摄影测量计算机视觉框架的免费开源三维重建软件...

从无到兴,一场关乎未来商业主干道的20年争夺战,一场云力的游戏。作者 | 小沐编辑 | 火柴Q当下中国云计算市场,巨人打架、战火纷呈。3...

以下内容由公众号:AIRX社区(国内领先的AI、AR、VR技术学习与交流平台) 整理发布入门视觉SLAM的基础知识-高翔(高翔博士)-----视频,吐...
以下内容由公众号:AIRX社区(国内领先的AI、AR、VR技术学习与交流平台) 整理1.Awesome-ARKit收集了丰富的ARKit的一些开源工程。地址:...

以下内容由公众号:AIRX社区(国内领先的AI、AR、VR技术学习与交流平台) 整理首发平台:AIRX社区awesome-computer-vision整理了比较全...
5 月 14 日 晚,黄仁勋在厨房召开了英伟达 GTC 2020 线上发布会。由于新冠病毒疫情影响,英伟达原计划的现场活动被迫取消,定于 3 月 24...

IEEE国际计算机视觉与模式识别会议 CVPR 2020 (IEEE Conference on Computer Vision and Pattern Recognition) 大会官方论文结果公布,...

作者:Ashok Chandrashekar, Fernando Amat, Justin Basilico and Tony Jebara编译:ronghuaiyang 首发:AI公园公众号

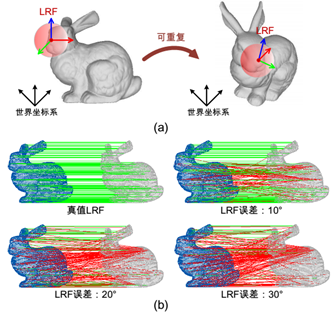
本次介绍一个发表于Pattern Recognition的经典三维点云描述子TOLDI,首先进行算法阐述,然后再给出数据集的介绍、局部参考坐标系与描述...
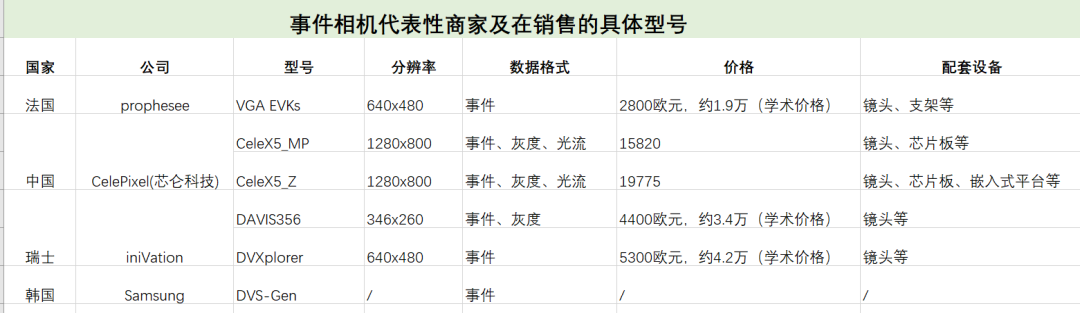
事件相机是一款新型传感器。不同于传统相机拍摄一幅完整的图像,事件相机拍摄的是“事件”,可以简单理解为“像素亮度的变化”,即事件相机...

本部分资源内容主要是国外的一些AI学习与开发内容,包括AI组织,视频课程,博客,书籍,YouTube频道,Quora,Github,书籍推荐,会议,...
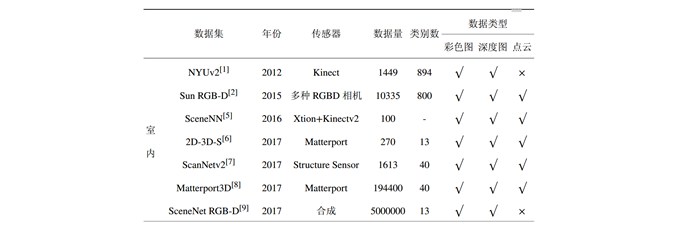
随着深度学习的发展,数据集的意义愈发重要,本节将介绍三维场景理解领域常用的数据集。依据场景类型不同,可划分为室内场景数据集和室...
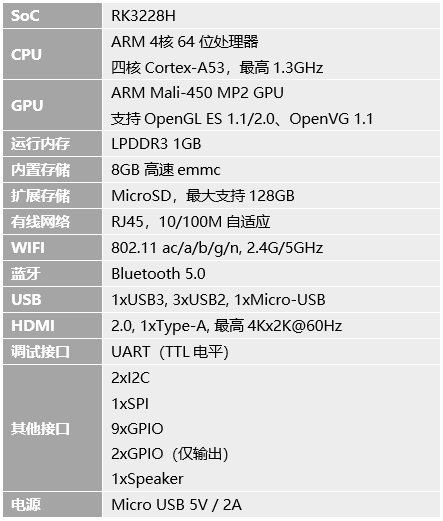
嵌入式人工智能开发套件EAIDK-310,EAIDK(Embedded Artificial Intelligence Development Kit)- 嵌入式人工智能开发套件 ,专为AI开发...
在研究中,为了比较不同算法的优劣,研究人员不能用自己采集的数据,这样和别的方法比较没有太大的意义。所以公开的数据集是评价这些方...
2020 年上半年最长的假期已经结束,年初突如其来的疫情还没有彻底消退,国内的情况已经好转,人们逐渐恢复了往日的忙碌,出差的、旅行的...

提到角点检测,非常出名的便是Harris角点,在传统图像领域使用非常多。但为了在事件相机的数据形式中使用,我们首先需要了解Harris角点...

在本文中,我们将构建一个深度学习模型来对图像中的对象进行分类。为了构建卷积神经网络,我们将使用Kaggle提供的这个数据集。([链接]...











