【GiantPandaCV导语】忙完手头工作,就赶紧来过了一遍 H100 白皮书。下面我就以框架开发和炼丹师的角度谈谈 H100 的一些新特性,如有说...

前天刚跟大家分享过支持PCIe Gen5的主机平台(以“小”见大:从Precision 3660看工作站技术发展趋势),适逢NVIDIA GTC大会,又有更多新品...
在开始使用 TAO 模型训练工具之前,我们必须先对其操作原理有个基础的理解,因为这套工具能支持 30 多种神经网络的深度学习,并且横跨视...
NVIDIA 将大部分应用透过 Dcoker 容器技术进行封装,并且为了协助开发人员更加轻松地使用这些软件,NVIDIA 特别开发了一个 nvidia-pyind...
全名为 NVIDIA GPU Cloud 的 NGC 中心,是近年来 NVIDIA 用来统筹应用资源的云中心,本身并不具备任何计算功能,主要就是“应用资源分类...

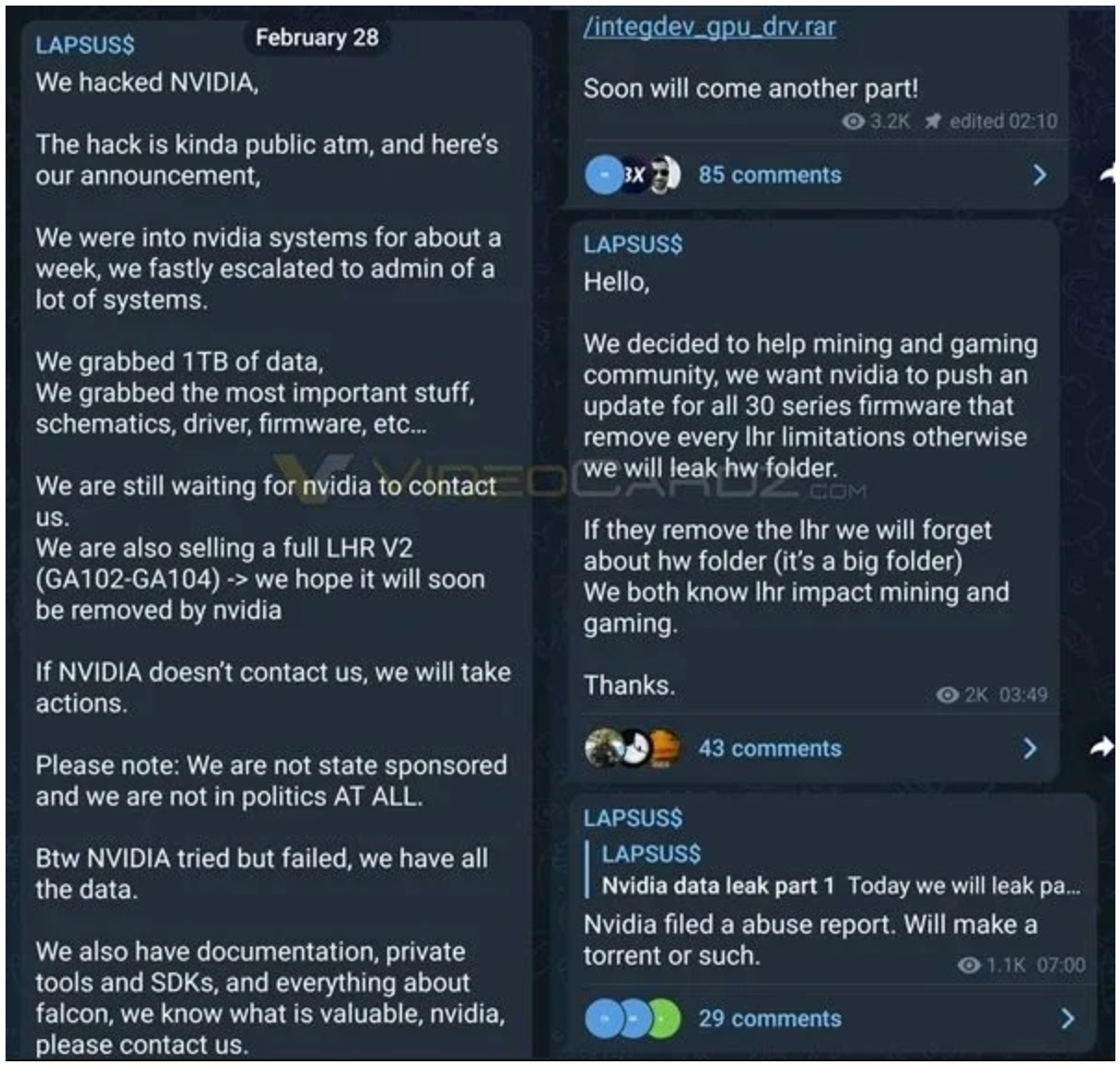
上周末,英伟达被南美黑客组织 LAPSU$ 盯上了,LAPSU$ 通过入侵英伟达内部服务器,导致超过 1TB 的数据泄露,并公开叫卖 RTX 30 系列显...
特征模型(features model)是人工智能深度学习的灵魂,其优劣程度决定了前端推理结果的成败,包括计算性能与精确度的综合考量,是整个人...

前一篇从 Jetson Projects 所挑选的“TRANSFER LEARNING WITH JETBOT & TRAFFIC CONES”项目,是延续避撞应用使用深度学习的图像分类技术...

避撞功能是智能车的最基本保护能力,Jetbot 使用深度学习的图像分类技术来模拟人眼习惯实现这个功能,但这只是智能车所展现的最入门应用...

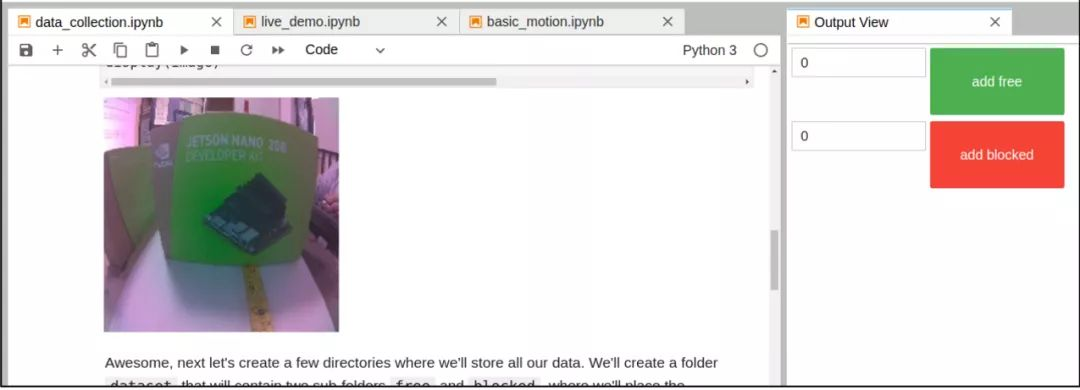
这原本应该是任何深度学习应用的第一个步骤,包括采集所需要的图像数据以及用框架工具进行模型训练,但这个过程比较枯燥乏味,因此在上...
避撞功能是 Jetbot 一开始最令人瞩目的功能,因为这是所有小车都必须具备的最基本“自我保护”的能力,而 Jetbot 没有任何距离传感,只凭...

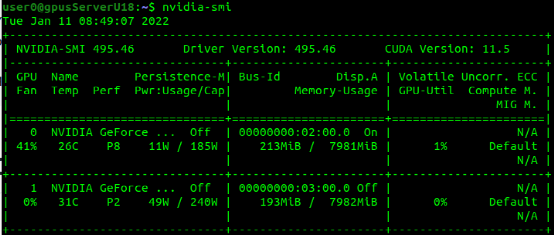
如果已经将 Jetbot 智能小车组装好的话,现在就可以开始执行 Jetbot 智能小车实验,接下来的操作都在以下环境中执行:

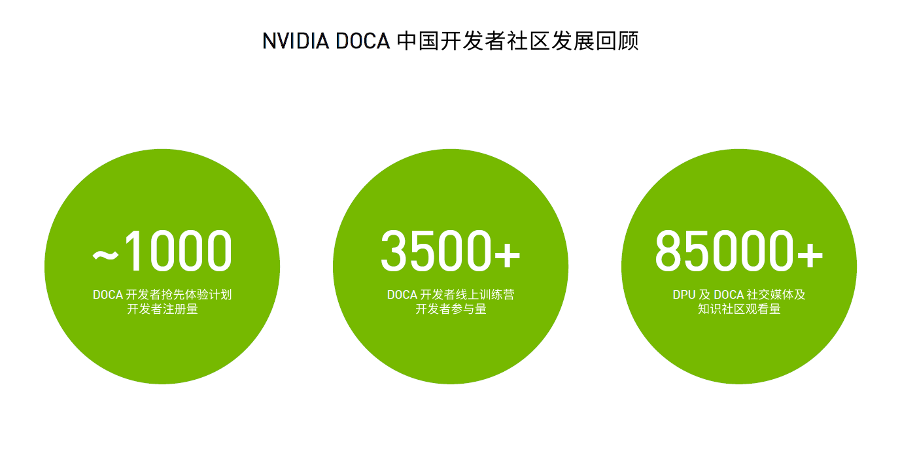
要破解这道难题,不能仅靠NVIDIA单打独斗,还需要“朋友们”众人拾柴。在2021年6月,为了有效的与广大中国开发者进行互动, NVIDIA 发布DO...
假如您的 Jetbot 小车是从外面采购第三方套件的话,可以跳过本文的内容。如果您是按照 jetbot.org 原厂的自行组装方式,那么本文所提供...

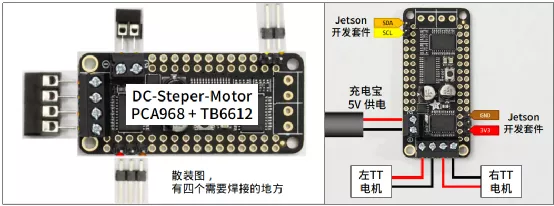
机电控制是智能车最重要的输出功能,假如您使用 Jetbot 官方的自行打印车体并用组装方式来搭建智能小车的话,就需要搭配下图这个 “DC-St...
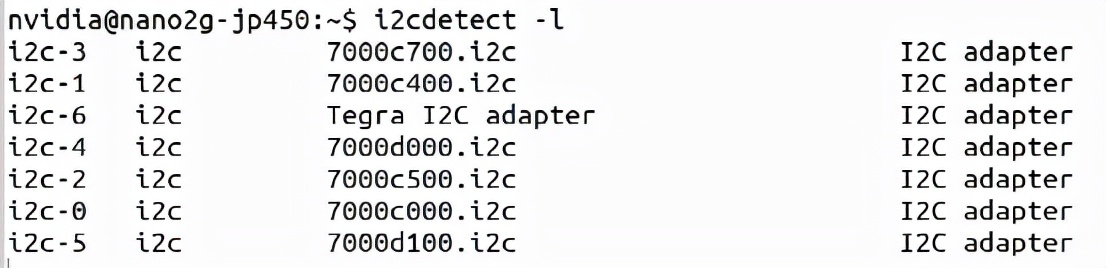
在上文中,我们已经将 SFIO 与 GPIO 之间的关系分析清楚了,接下来我们就带大家更深入地了解一下 I2C 引脚与开发库的使用,以及调整 PiO...
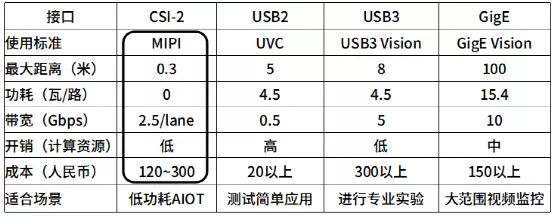
在最开始介绍 Jetbot 的时候有提到,这套智能小车只使用一个 CSI 摄像头作为全部输入的设备,因为这种设备的体积轻巧、功耗较低,并且 N...
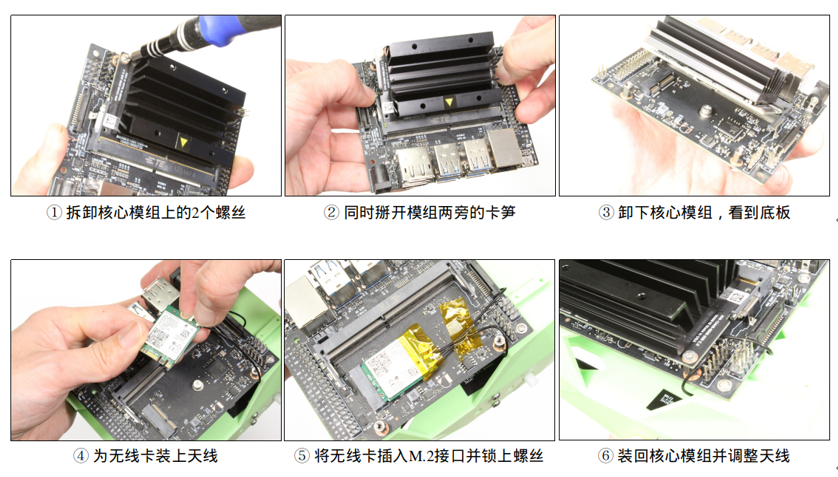
无线网络是操控无人车的必要设备,因为我们不可能让无人车拖着一条网路线去进行操作。要为Jetson Nano(含2GB)装上一片无线网卡是非常...
其中安培卡主要包括 A100、A40、A30、A16、A10、A2,老推理卡主要包括 T4、P4、P40、V100,本文主要用于从老推理卡迁移到新安培...
其二,Niantic 推出构建「真实世界元宇宙」应用的平台——Lightship,它是为 AR 眼镜构建的视觉定位系统,能够准确识别其在真实世界中的位...











