在“双碳”政策的推动下,双电机凭借高效化、集成化、智能化等特性,在新能源汽车、工业自动化、医疗设备以及可再生能源等领域的重要性日...

MDPWM介绍 MindPWM 是灵动微电子自主研发的高精度脉宽调制器模块,该模块拥有最多 4 个子模块,每个子模块都配有一个单独的 16 ...

根据《DS_MM32F5370_V0.53_SC》数据手册可知,板载MCU集成多组定时器,各定时器特性有如下: ① – 1个16位超级定时器组(MindPWM),每个...

本文介绍了Mini-F5375-OB开发板实现轮趣TB6612驱动板的使用,驱动直流有刷减速电机转动方向、旋转速度的精准控制。

前言:无感控制策略是电机控制中的研究热点之一,接下来分几期文章做一个PMSM的无感专题。通过理论和验证两个角度进行对介绍的方法策略...
前言:无感控制策略是电机控制中的研究热点之一,接下来分几期文章做一个PMSM的无感专题。通过理论和验证两个角度进行对介绍的方法策略...
1.高级定时器介绍 高级定时器相比于通用定时器具有互补输出,死区保护以及刹车控制等高级控制功能,这三个功能常用于三相直流无刷电机的...

1.应用场景在电机控制领域,直流无刷电机的FOC有感控制技术可以用到磁编码器的角度值用于双闭环控制系统中,MT6835是21位核心角度分辨率...

最开始使用AS5600作为电机的位置传感器,后面发现运行一段时间会挂,不知道是不是iic线太长了,懒得去排查,也懒得重新焊线。而AS5047是...

项目介绍 由于刚刚好手上有学长遗留下来的步进电机驱动器和步进电机,便使用灵动 Mini-F5375-OB 开发做主控驱动步进电机。 该项目基于灵...

前言:在电机控制中,SVPWM 必须要加入一段死区时间来防止 IGBT 的上下桥臂直通而造成炸机的可能。但死区时间的引入也会造成电机控制性...

本文介绍了灵动 Mini-F5375-OB 开发板实现 28BYJ-48 步进电机驱动,以及旋转角度、旋转速度的精确控制的项目设计。

首先感谢灵动微电子和极术社区提供免费的开发板。刚好这段时间我们的电机驱动产品准备更换成国产方案,基于各种原因综合考虑,选择了灵...

前言:电流环作为控制系统的内环,其性能的优劣直接决定了伺服系统外环控制性能的好坏。因此在对控制系统的转速环控制器设计之前,需对...

非常感谢各位对极术社区及灵动的支持!限时一周的基于灵动MM32F5370产品的实时控制开发板评测活动已经结束,经过严格的评估和筛选,最终...

本期极术公开课,特邀灵动的两位资深技术专家为大家全面解读了MM32F5370产品及其全新的配套开发工具Mini-F5375-OB开发板,同时重点介绍...

随着机器人技术的快速发展,其应用场景已从工业制造扩展到物流、服务、医疗、家庭服务等多个领域。从仓储分拣机器人到教育机器人,从家...

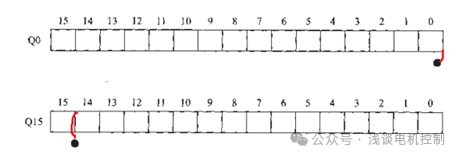
前言:本章主要介绍系统标幺化处理和 Q 格式化相关的内容,并进行仿真建模分析验证。那控制系统为什么要进行标幺化处理?由控制芯片决定...
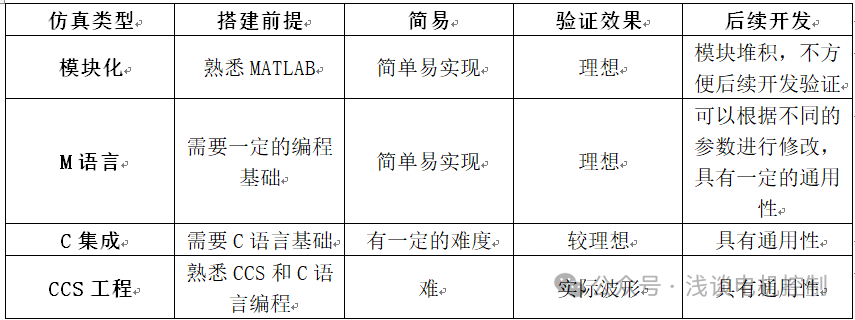
前言:电机控制的开发验证有多种途径和方式,常见的分为模型仿真验证和硬件测试两大类。接下来以 MATLAB+CCS 的 IDE 开发环境来进行仿真...
🧭 本文介绍了 DFRobot Beetle RP2350 开发板实现步进电机驱动的项目设计,主要包括旋转角度的精确控制、串口发送实现自定义角度旋转、OL...















