AT命令作为主控芯片与通信模块的协议接口,通常使用串口作为通信协议的传输,因此在通信模块中硬件接口通常为串口,这样简化了主控设备...

摘要:用Rhealstone基准程序方法,分别测试Zephyr和FreeRTOS两个RTOS的六个实时性能指标,发现Zephyr指标较差。考虑到任务切换时间是其...
非常感谢极术社区和灵动微电子开展的MM32F5270开发板试用申请活动,能够让我有幸接触MM32F5F5270开发板,作为一个电子爱好者,个人非常...
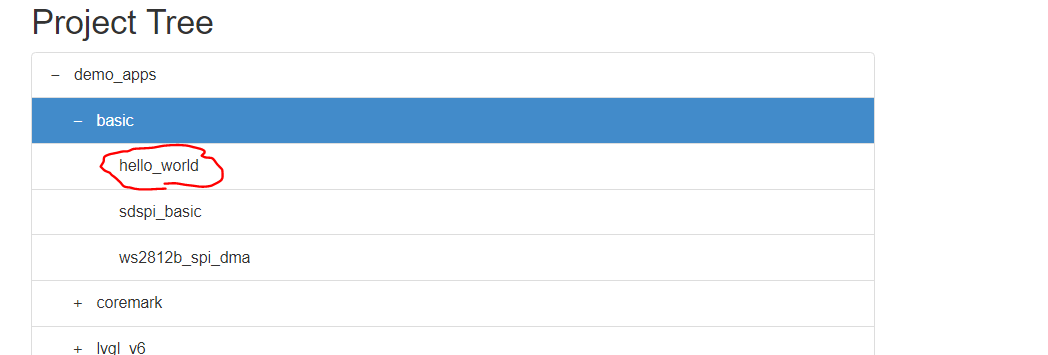
对MM32的初步感受:第一次使用mm32,因为有mindsdk,配置完环境后,直接上手体验了几个demo,感觉mm32和stm32差别不大,上手体验很好,本...

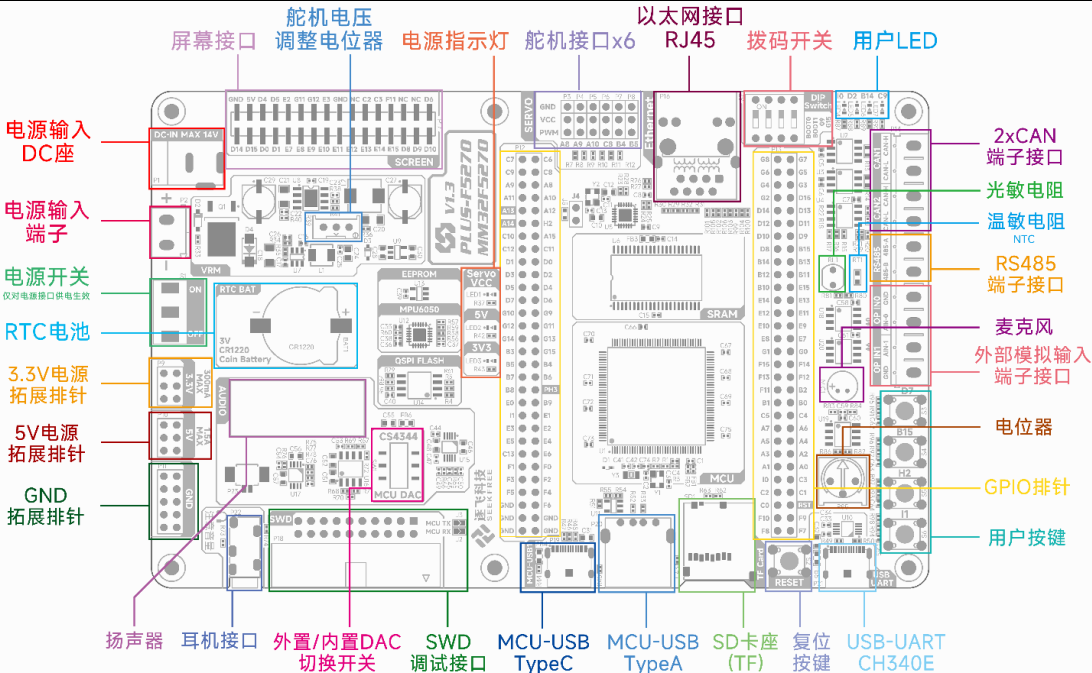
开发板到手,可以看到引出的GPIO,全部按0到15的顺序排列好了,这样以后找引脚的时候就方便太多了。

在AI操控机器人系列第二期的人体跟随教程中,身为地平线资深程序员的奶爸朱靠,使用地平线发布的机器人开发平台TogetherROS软件栈,搭建...
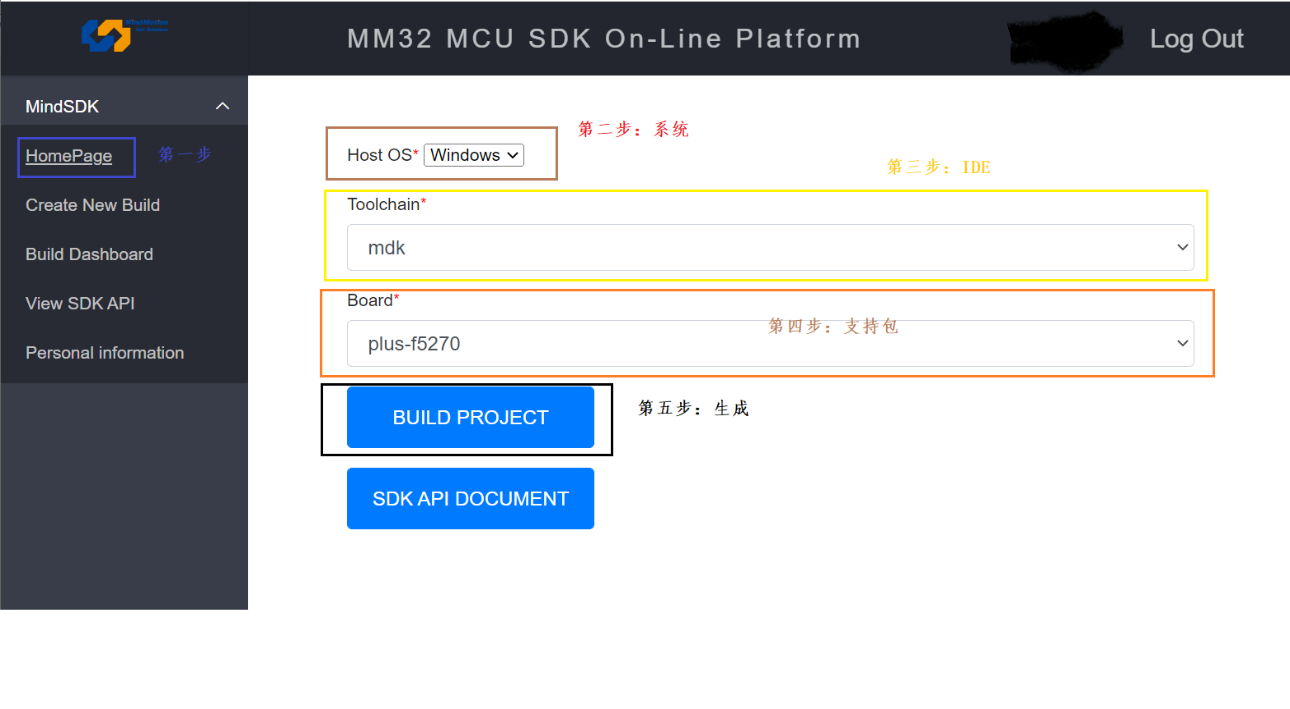
收到开发板了,下面按照教程来搭建开发环境,并测试例程。一、准备资料1、MDK软件使用最新的软件,版本:MDK537下载地址:链接2、下载芯...

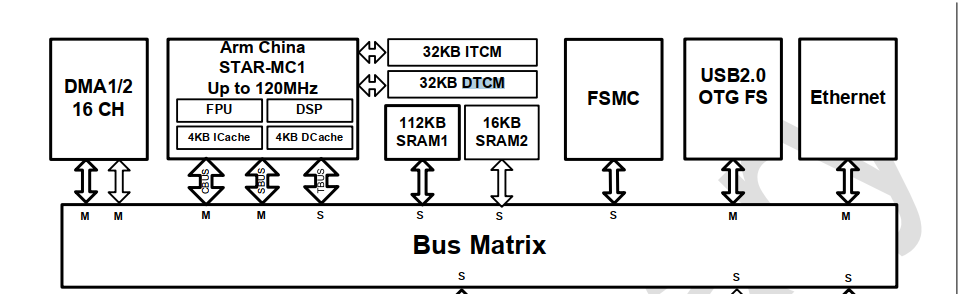
本文是基于安谋科技“星辰”STAR-MC1处理器的MM32F5270芯片及开发板介绍,资料下载以及工程师评测,灵动微技术笔记文章汇总。
PLUS-F5270开发板基于灵动MM32F5系列芯片的Armv8-M 架构的 “星辰” STAR-MC1 处理器,资料链接:[链接]。试用前准备好开发环境Keil 3.7以...
原文中已经对拿到板子需要做的工作进行了较为详细的描述,但是对一些重要步骤的描述过于简略,导致编译下载过程出现一些问题。
【说在前面的话】在前面的文章《【喂到嘴边了的模块】准备徒手撸GUI?用Arm-2D三分钟就够了》中,我们介绍了如何借助cmsis-pack快速的在...
首先,感谢灵动微电子与极术社区给予宝贵的试用机会。借助本次对Plus-F5270开发板的试用,第一次接触到了高性能物联网开发板,非常荣幸...
在完成所有项目后会开源,目前初步是想做一个通过DHT11采集信息,OLED显示,ESP8266上传,可通过小程序查看的简易智能家居事例。
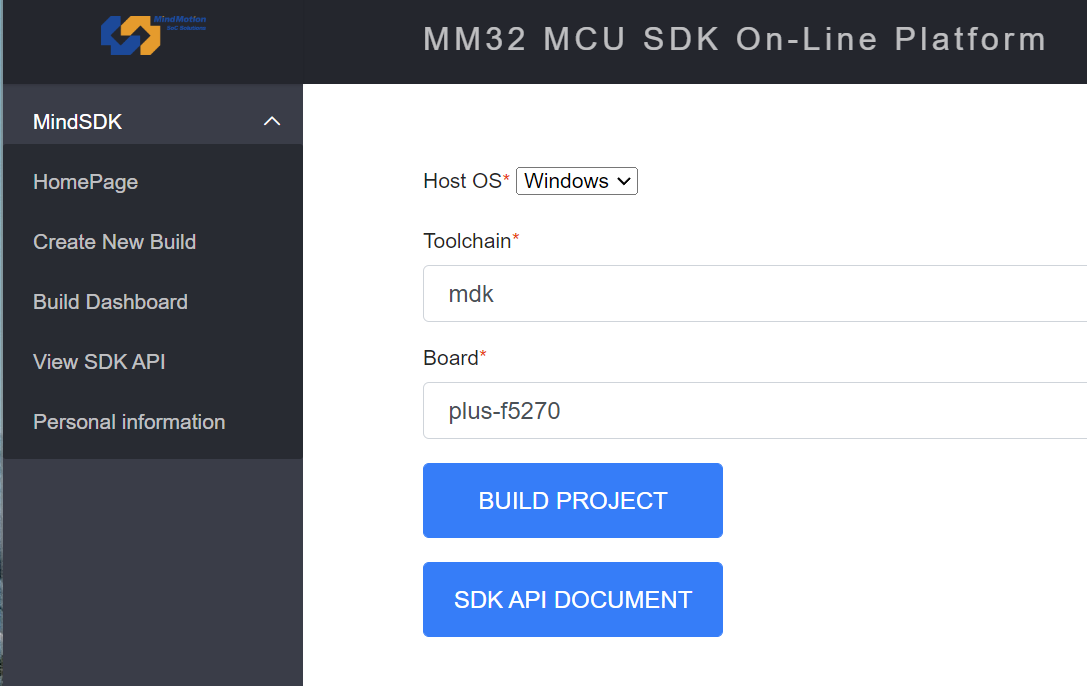
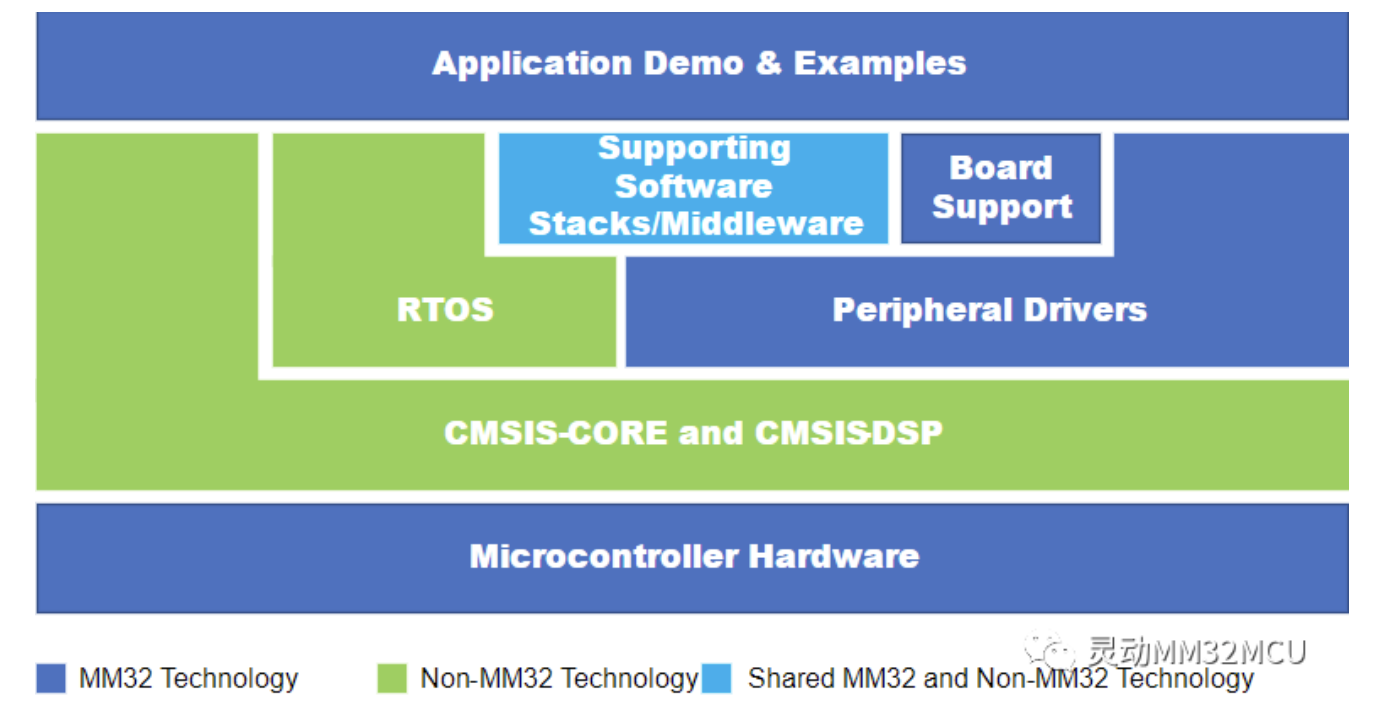
MindSDK(mm32-mcu-sdk)是由灵动官方的软件团队开发和维护的基于灵动微控制器的软件开发平台。
极海半导体宣布,推出基于Arm® Cortex®-M4内核的高性能、高安全APM32F405/415工业级MCU新品,具有大容量、宽温幅、高稳定性、高可靠性与...

问题的提出在设计机器人结构时,我们常常会用到舵机,作为旭日x3派“首百尝鲜”活动的试用者,本次实验我准备用旭日x3派控制一台舵机,为...
很开心拿到旭日派x3的体验权,先简单的上几个图可以看到,板子的做工非常完美,同时,感谢社区里的大佬制作的X3派外壳,已3D打印安排上...

在ARM处理器的A、R、M三大系列中,M系列因为极低的功耗和极高的性价比而在物联网、深度嵌入式和实时控制等领域有着非常广泛的应用。
在MM32F5270中有:– 多达 192KB 的 SRAM,其中包括 32KB 指令 TCM(ITCM), 32KB 数据 TCM(DTCM)和 128KB 的系统 RAM,DTCM地址是从0...
InfoNES安装SDLsudo apt install libsdl1.2-dev下载代码git clone [链接]cd InfoNES-1/cd src/sdl/编译make安装sudo make install运行将...
点击链接,直达观看**本文转自地平线开发者社区原作者:qinyunti原链接:[链接]**

上一篇文章:【MM32F5270开发板试用】一、依靠SPI_SD,移植FatFs文件系统本次所有代码按照以前习惯全部开源:我的Github地址是:[链接]...
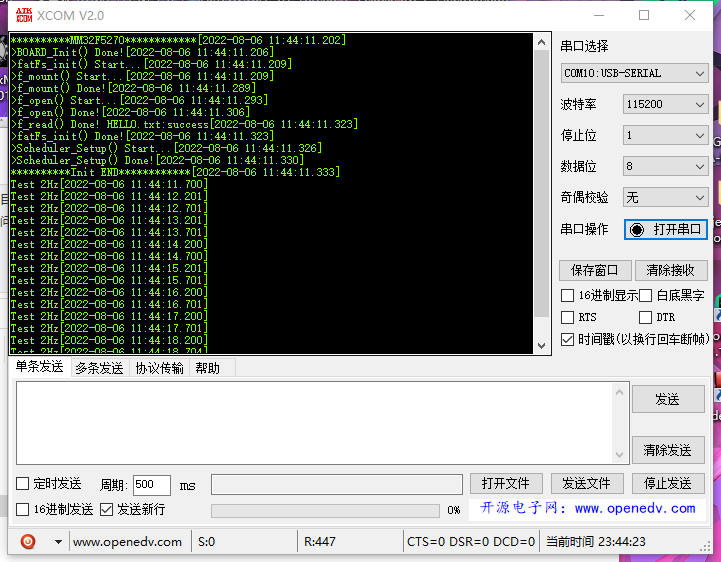
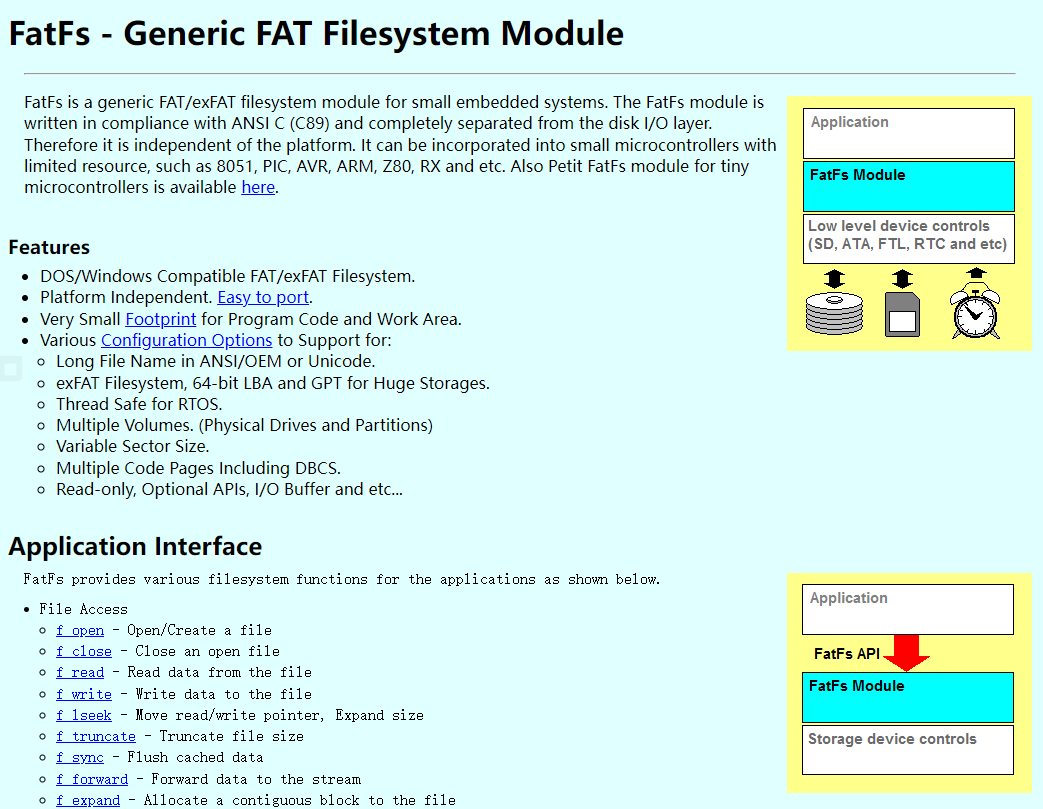
FatFs是用于小型嵌入式系统的通用FAT / exFAT文件系统模块。FatFs模块是按照ANSI C(C89)编写的,并且与磁盘I/O层完全分开。因此,它独...
经典的深度学习工程是从确认任务目标开始的,我们首先来简单地介绍一下 OCR 中的文本识别任务以及本期部署实战课程中我们所使用的工具和...
摘要:分析嵌入式系统GUI选型时需要考虑的问题,简要介绍目前嵌入式系统使用的ToughGFX、emWin、Embedded Wizard、uGFX、LittlevGL、Min...
做这个主要为了方便大家调试、编译灵动微MM32F5系列的MicroPython镜像。里面自带的MicroPython版本是 1.16。
摘要:根据IOT设备的需求,以及IOT OS需要满足的技术特征、现有IOT OS的来源,分别概述FreeRTOS、AliOS-Things、RT-Thread、Lite OS、Ze...
在AI操控机器人系列第一期的手势控制教程中,身为地平线资深程序员的奶爸,使用地平线发布的机器人开发平台TogetherROS软件栈,搭建了手...
很开心能有机会作为旭日x3派的新品体验官来体验一下公司自家的开发板,作为一名地平线的算法工程师,实话实说平时工作中其实很少有机会...

旭日X3派开发板提供了40PIN标准接口,方便用户扩展外围设备。其中物理引脚编号8和10为串口通信发送和接收使用(8-TXD,10-RXD)。40PIN引...



 IoT 与嵌入式
IoT 与嵌入式
 安谋科技自研产品
安谋科技自研产品
 AI 应用
AI 应用
 Arm 计算
Arm 计算
 SoC 芯片设计
SoC 芯片设计
 教育与职场
教育与职场
 全球资源
全球资源
 SegmentFault
SegmentFault 移知
移知 安芯教育
安芯教育 InfoQ
InfoQ 深圳湾
深圳湾 脑极体
脑极体 甲子光年
甲子光年 半导体行业观察
半导体行业观察 爱集微
爱集微 E 企研究院
E 企研究院 CSDN
CSDN 全志在线
全志在线 智东西
智东西
























