作者:SFXiang首发:AI算法修炼营本文是我在浏览CVPR2020文章中发现的一篇有趣的有关玻璃检测的文章,平常很少有人关注玻璃检测有关的任...

2005年,Herb Sutter发表了他的开创性文章 "免费的午餐结束了"(Sutter,2005)。他概述说,微处理器的连续性能很快就会趋于平稳,业界...
对监控领域的目标跟踪方法以及面临的挑战进行了一个介绍,是一个很好的了解目标跟踪领域的“是什么”和“为什么”问题的文章。
功能安全在各种市场中变得越来越重要和普遍,这一点在汽车和工业领域得到了明确的体现。汽车工业中的功能安全最初只限于汽车内少数电子...

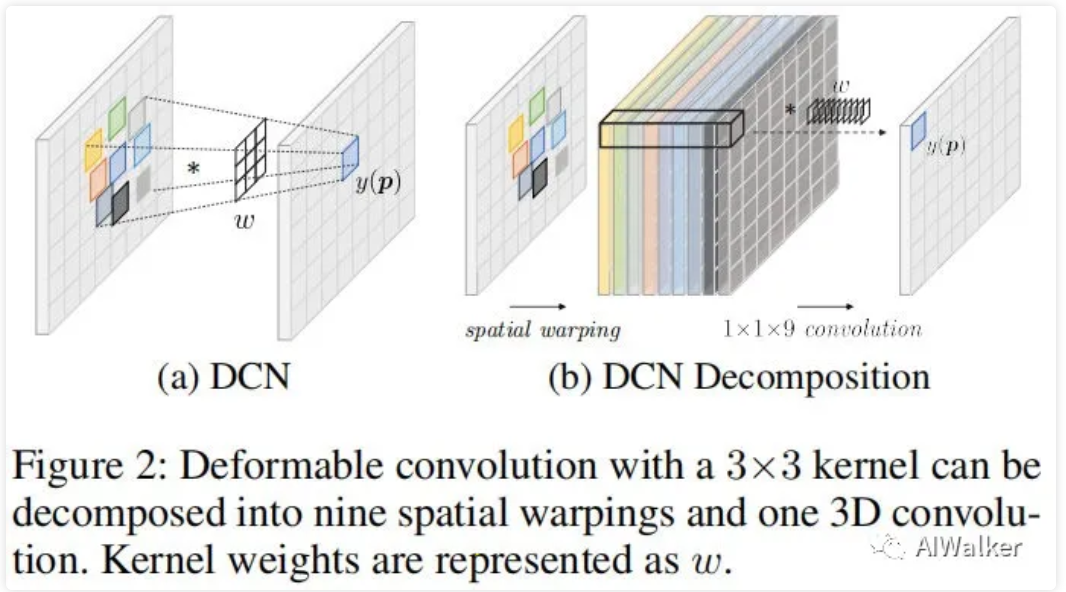
【Happy导语】该文是EDVR作者在视频超分领域的又一深入思考,它将变形对齐与光流对齐进行了“桥接”,分析了变形对齐在视频超分领域成功的...
首发:AI公园公众号作者:Etienne编译:ronghuaiyang导读你并不总是有足够的图像来训练一个深度神经网络。下面是教你如何通过几个样本让...

首发:AI公园公众号作者:kartik4949编译:ronghuaiyang导读给大家介绍一个非常好用的TensorFlow数据pipeline工具。高性能的Tensorflow ...

梁宇,朋友们给他起了个“大白”的外号,幽默、细腻、耐心、谦和、优质倾听者——焦虑与浮躁弥漫的时代下,很稀罕的一种气质。

该文是百度研究员针对ResNet提出的一种改进,它提出一种新颖的Hierarchical-Split Block,一种“即插即用”的模块。它可以提供更充分的感...
今天给大家介绍一篇图像超分辨率邻域的综述,这篇综述总结了图像超分辨率领域的几方面:problem settings、数据集、performance metrics...

首发:AI公园公众号作者:Noé 编译:ronghuaiyang导读回顾了场景文本检测和识别领域的3篇论文,分别是检测,识别以及端到端的方法。基于...

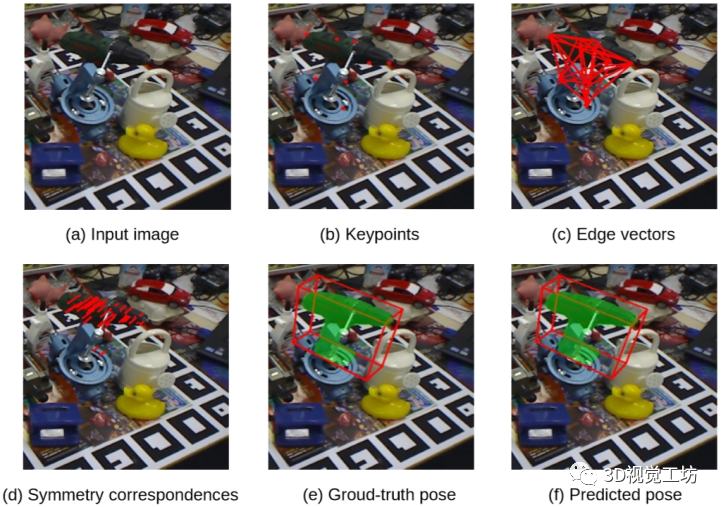
论文题目:HybridPose: 6D Object Pose Estimation under Hybrid Representations
NeurIPS终于放榜,提交数再次创新高,与去年相比增加了38%,共计达到9454篇,总接收1900篇,其中谷歌以169篇傲视群雄,清华大学63篇,南...
由于云芯一号比较难配置静态外网ip,笔者每次连接云芯一号都需要大费周折地通过连接显示屏和键盘来查看云芯一号的内网ip地址,或者通过...
这是一篇关于图像分割损失函数的总结,具体包括:Binary Cross EntropyWeighted Cross EntropyBalanced Cross EntropyDice LossFocal lo...
本文认为,anchor based和anchor free物体检测方法的本质区别在于如何选择样本,文章通过实验验证了这个想法,并提出了一种自动选取样本...

刚刚过去的国庆长假,使交通拥堵再度成为焦点。日前,飞腾携手同有科技推出 交通行业全闪存联合解决方案,为全国交通运输行业车辆信息数...
激光三角测量法,是工业视觉领域较为常用也是比较容易理解的一种3D检测算法。本文主要从应用层次来阐述,包括相机和激光选型、搭接方式...
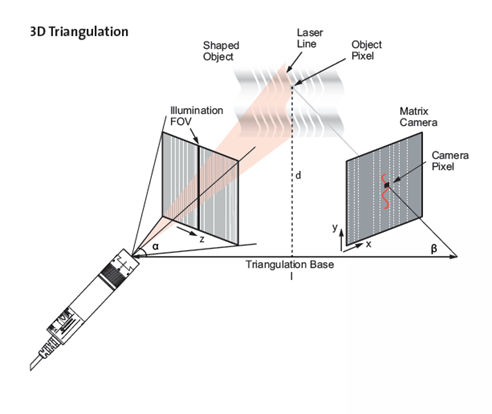
来源:OpenCV学堂投稿作者:小黄弟 来自:中国电科智慧城市建模仿真与智能技术重点实验室文字编辑:gloomyfish
这篇文章收录于ECCV2020,由北京大学、商汤科技、香港中文大学提出的基于RGB-D图像的语义分割算法。充分考虑了RGB图像信息和深度信息的...