《三体》动画终于开播,前两集开篇即是被「智子」干扰的粒子对撞实验,以及呼之欲出的「面壁者」计划。成功地渲染出一场人类科技进化濒...

为了给客户的测试和开发提供便利,飞凌嵌入式的开发板产品一般都支持多种操作系统,以基于全志T507H处理器设计研发的OKT507-C开发板为例...

在笔者看来,MAIX-III AXera-Pi 的特色不仅仅是高性价比以及丰富的 AI 应用,更多的是多元化的支持以及应用场景。

从前文可知第三代的 MAIX-III AXera-Pi 相较以往的 Ai 开发板可谓是焕然一新,但怎样才能让学生、工程师、企业接受这款新产品呢?笔者认...
在过去的两年,SIPEED 从 MAIX-I MCU 系列升级到了 MAIX-II SoC 系列,而在今年 SIPEED 则推出了 MAIX-III Linux 系列的一款 3.6TOPs@IN...

在嵌入式系统上操作的高效点云3D目标检测对于包括自动驾驶在内的许多机器人应用来说都是重要的。大多数以前的工作都试图使用基于Anchor...

非常感谢极术社区和聆思科技提供的这次试用机会。手里恰好有一块英伟达的板子,之前在上面移植了当时比较新的yoloV5网络,实现了目标检...
实时语义分割在智能汽车场景中发挥了重要作用。最近,许多网络已经结合了来自多尺度感受野的信息,以促进实时语义分割任务中的特征提取...

标题:Scaling Language-Image Pre-training via Masking

如果说各种 AR/VR 设备是进入元宇宙的门票的话,那么随之兴起的各种 AR/VR 设备配件则能让你的「游园」体验更进一步。

苹果正在开发 AR/VR 头戴设备的消息最早可以追溯到 2021 年初(甚至更早),尽管苹果从未在公开场合透露出任何相关的消息,但是,随着相...

伴随着史上最贵卡塔尔世界杯的到来,很多社交平台提供了丰富多样的 AR 滤镜,为球迷们带来了一系列「沉浸」体验。

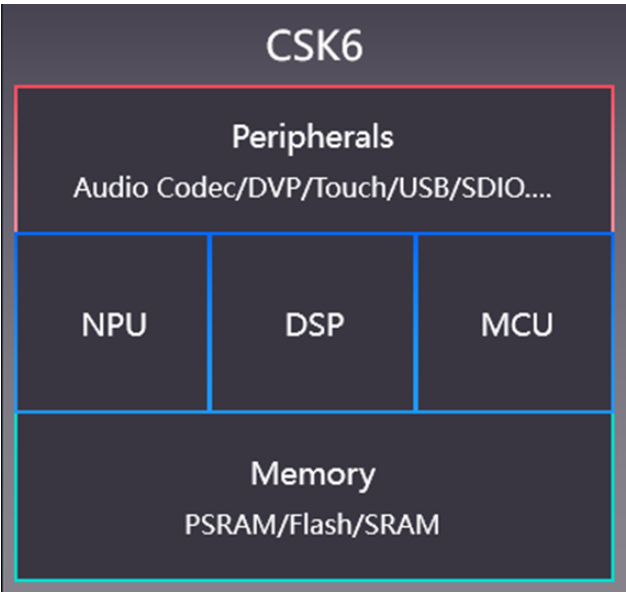
STAR-MC1 + HIFI4 双核架构,主频最高支持300MHz,算力达128GOPS最近异构芯片一大堆,不知道后续提供什么开发环境。然后发现NPU和DSP资料...
感谢极术社区联合聆思组织的本次活动,很荣幸得到本次体验国产AI MCU的机会。官方的文档写的很详细,技术支持也很及时,使开发者能够快...
🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取最新的动态。如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟如果对您有帮助,...

许多新兴智能物联网应用对轻量级多人姿势估计的需求越来越大。然而,现有算法往往具有较大的模型尺寸和密集的计算需求,使得它们不适合...

基于Transformer的检测器(DETR)由于其稀疏的训练范式和去除后处理操作而引起了极大的关注,但是这个庞大的模型在计算上非常耗时,并且...

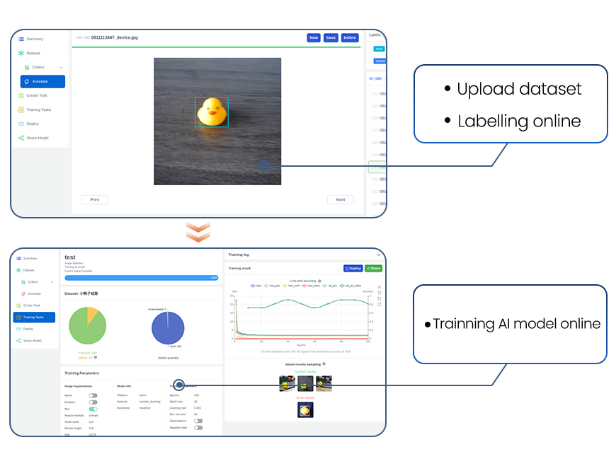
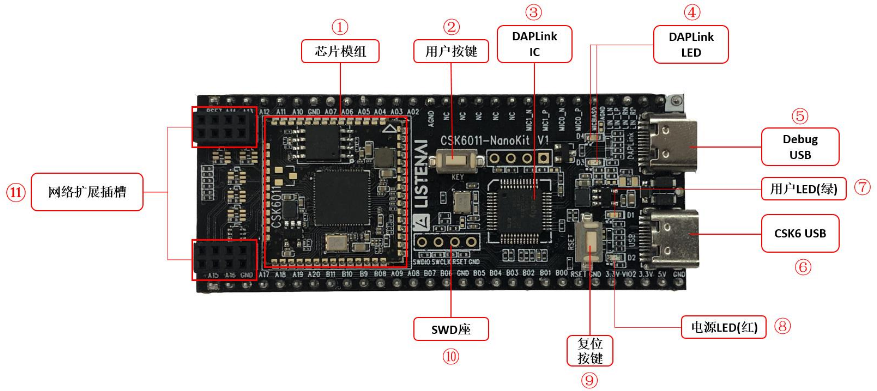
CSK6 是聆思科技新一代的 AI 芯片 SoC 产品系列,采用多核异构架构,集成了 ARM Star MCU,HiFi4 DSP,以及聆思全新设计的 AI 神经网络...
四年一度的世界杯已正式拉开战幕,各小组比赛正如火如荼地进行中。在这样一场球迷的盛宴中,不如让 Towhee 带你「以文搜球」,一览绿茵...

全卷积检测器放弃一对多匹配,采用一对一匹配策略实现端到端检测,但存在收敛速度慢的问题。在本文中重新审视了这两种匹配方法,发现将...

在之前的文章中,我们已经搭建过「以文搜图」、「以图搜图」等搜索服务,而今天这篇文章,将要教会你如何搭建一个「视频动作分类」的 AI...

🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取最新的动态。如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟如果对您有帮助,...
11 月 17 日,2022 骁龙峰会第二日,高通带来新款 AR 芯片平台骁龙 AR2。 一改以往 XR 平台系列的命名,直接将新平台唤作 AR。 在媒体连...

目标检测是计算机视觉中的一个重要课题,后处理是典型目标检测流水线的重要组成部分,这对传统目标检测模型的性能造成了严重的瓶颈。作...

直播主题 人脸识别算法最佳应用实践讲解 直播时间 11月17日 周四 20:00 直播平台 方式一:[链接] 点击链接预约进入直播间 方式二:在哔...

相比近年来大尺度ViT取得的巨大成功,基于CNN的大尺度模型仍处于早期阶段。本文提出了一种新的基于CNN的大尺度基础模型InternImage,它...

🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取最新的动态。如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟如果对您有帮助,...

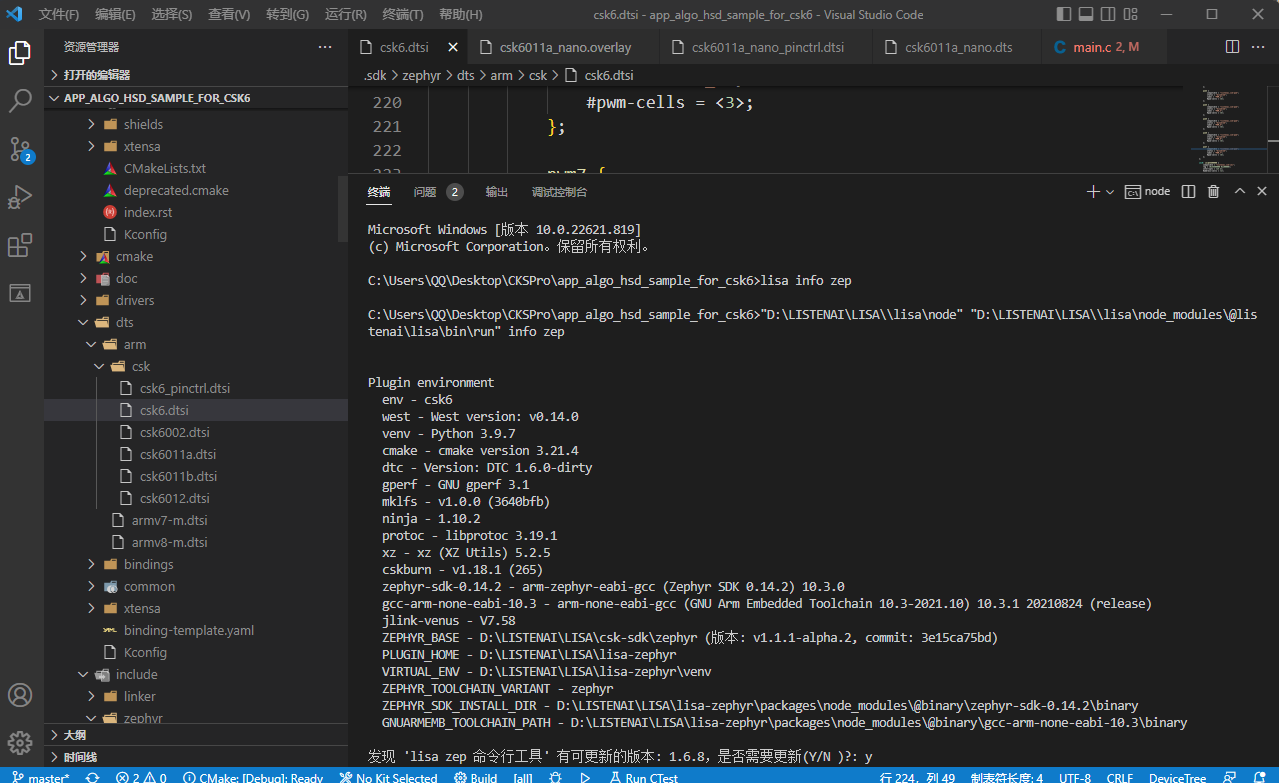
环境搭建官方文档详细环境搭建教程:环境搭建1、下载 Git 进行安装。2、安装 lisa zep 工具,并初始化 CSK6 SDK 所需的开发环境。3、检...
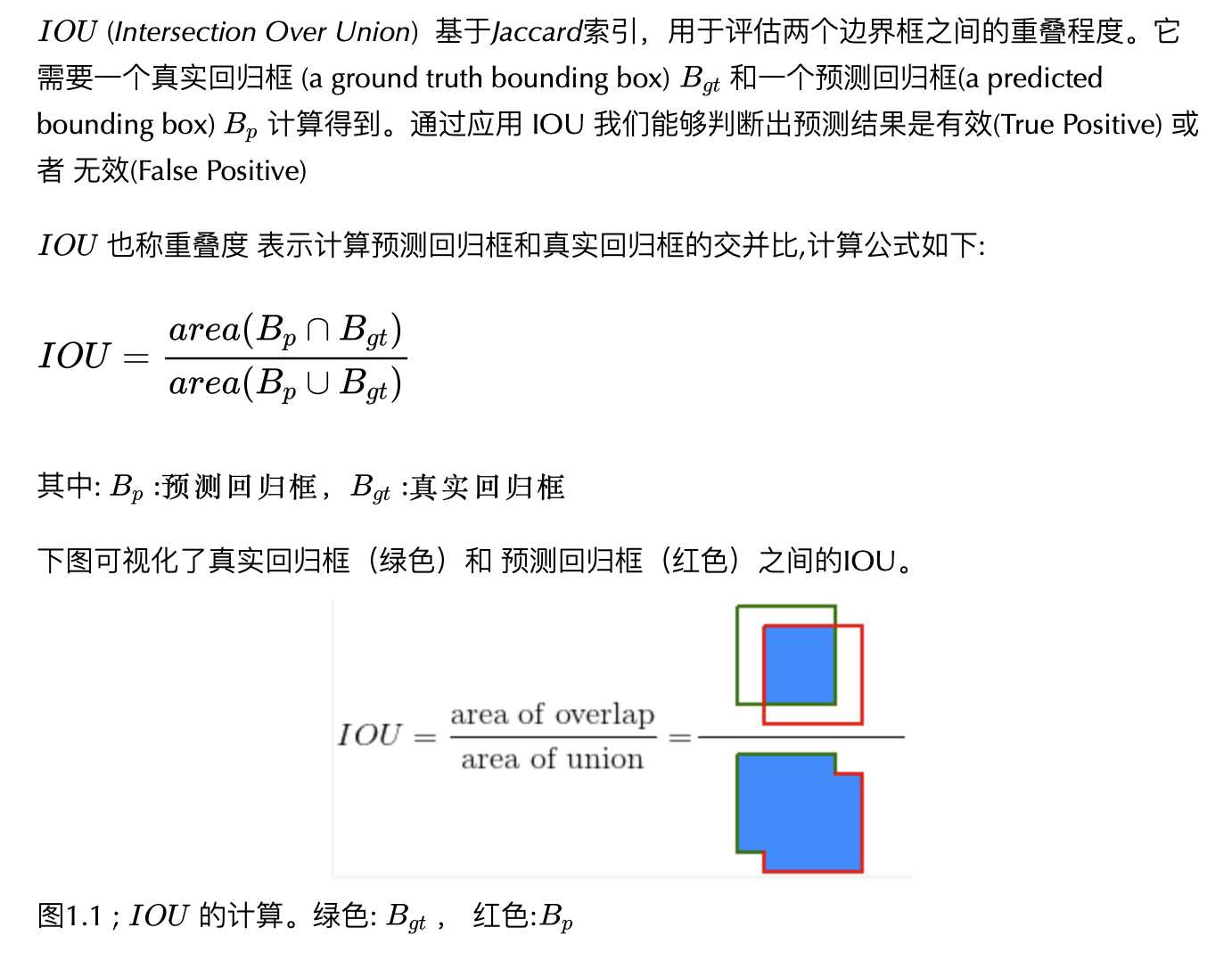
任意方向目标检测是遥感图像目标检测与自然场景文字检测中最基本的任务。本文提出了一种高效的Anchor-free 旋转目标检测方案PP-YOLOE-R...
🎉代码仓库地址:[链接]欢迎star one-yolov5项目 获取 最新的动态。 如果您有问题,欢迎在仓库给我们提出宝贵的意见。🌟🌟🌟 如果对您有帮...



 AI 应用
AI 应用
 安谋科技自研产品
安谋科技自研产品
 Arm 计算
Arm 计算
 SoC 芯片设计
SoC 芯片设计
 IoT 与嵌入式
IoT 与嵌入式
 教育与职场
教育与职场
 全球资源
全球资源
 SegmentFault
SegmentFault 移知
移知 安芯教育
安芯教育 InfoQ
InfoQ 深圳湾
深圳湾 脑极体
脑极体 甲子光年
甲子光年 半导体行业观察
半导体行业观察 爱集微
爱集微 E 企研究院
E 企研究院 CSDN
CSDN 全志在线
全志在线 智东西
智东西




















